![�o�͔g�`(���])](stepping16-1.jpg)
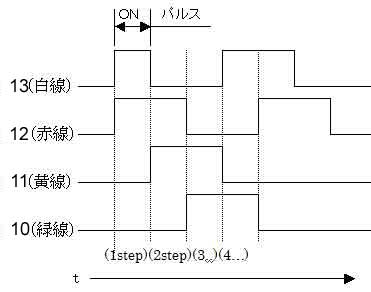
�t�]�o��(����->����->�ԉ�->���� ��4step�J��Ԃ�)
![�o�͔g�`(�t�])](stepping16-2.jpg)
| �X�e�b�s���O ���[�^ | RC�T�[�{���[ �^ | |
| ���� | �����p���X����x�Ɉ��̊p�x������]���܂��B �Ⴆ�A����̃��[�^�Ȃ烏���p���X(1step)��1.25�x��]�ł��B |
����p���X��ON�����镝�ɂ���]�p�x�����܂�܂��B |
| ��] | �A����]OK ����̃��[�^��288�X�e�b�v�łP��]�Ȃ̂ŁA 864�p���X����R��]���Ď~�܂�܂��B �܂��A�p���X��ON�����镝��ς���Ɖ�]���x���ς��܂��B |
�O�`180�x�܂ł̉�]�ł��B (360�x��]���镨������) ��]���x�͐���s�A���[�^�Ɉˑ����܂��B |
| ���x | ��~���x�͒Ⴍ���[�^�Ɉˑ����܂��B �Ⴆ�A����̃��[�^�Ȃ�1.25�x�܂��ł��B |
��~���x�͍��� �����ɃG���R�[�_���L��̂ŏ�ɒ�~�ʒu���L�[�v����(�t�B�[�h�o�b�N����)�B |
| �g���N | �ᑬ��ł̃g���N���傫���A����]�ɂȂ�g���N�������� �Ȃ�A���̂�����]���Ȃ��Ȃ�B | �ᑬ�`������Ńg���N�����肵�Ă���B |
| ��H | FET���Ńh���C�o�[�����K�v������B (�}�C�R���ւ̔z���͂S�{�F�Q����) |
�ȒP�A���i�s�v (�}�C�R���ւ̔z���͂P�{) |
| ���i | ���� | ���� |
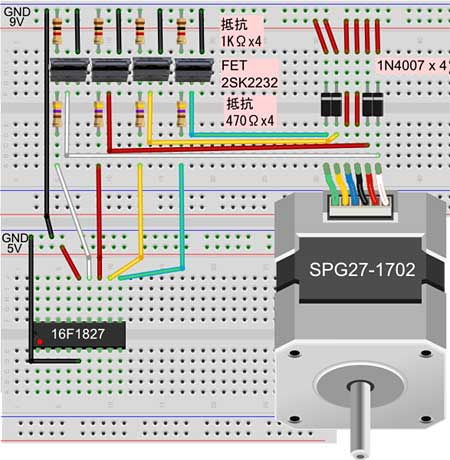 ���̍��}�����Ԕz���}�ł��B
���̍��}�����Ԕz���}�ł��B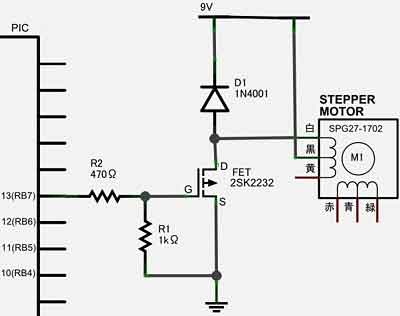
 ���̗l�ɂQ��H�������n�m������������Q���㎥�����ƌ����܂��B
���̗l�ɂQ��H�������n�m������������Q���㎥�����ƌ����܂��B
���]�o��(����->�ԉ�->����->���� ��4step�J��Ԃ�)
�t�]�o��(����->����->�ԉ�->���� ��4step�J��Ԃ�)
---------------------------------------------------------------------
#include <xc.h>
#define _XTAL_FREQ 8000000 // delay�p�ɕK�v(�N���b�N8MHz���w��)
// �R���t�B�M�����[�V�����P�̐ݒ�
#pragma config FOSC = INTOSC // �����ۯ����g�p����(INTOSC)
#pragma config WDTE = OFF // �����ޯ����ϰ����(OFF)
#pragma config PWRTE = ON // �d��ON����64ms�����۸��т��J�n����(ON)
#pragma config MCLRE = OFF // �O��ؾ�ĐM���͎g�p���������ٓ���(RA5)��݂Ƃ���(OFF)
#pragma config CP = OFF // ��۸�����ذ��ی삵�Ȃ�(OFF)
#pragma config CPD = OFF // �ް���ذ��ی삵�Ȃ�(OFF)
#pragma config BOREN = ON // �d���d���~���펞�Ď��@�\ON(ON)
#pragma config CLKOUTEN = OFF // CLKOUT��݂�RA6��݂Ŏg�p����(OFF)
#pragma config IESO = OFF // �O���E�����ۯ��̐ؑւ��ł̋N���͂Ȃ�(OFF)
#pragma config FCMEN = OFF // �O���ۯ��Ď����Ȃ�(FCMEN_OFF)
// �R���t�B�M�����[�V�����Q�̐ݒ�
#pragma config WRT = OFF // Flash��ذ��ی삵�Ȃ�(OFF)
#pragma config PLLEN = OFF // ����N���b�N��32MHz�ł͓��삳���Ȃ�(OFF)
#pragma config STVREN = ON // �X�^�b�N���I�[�o�t���[��A���_�[�t���[�����烊�Z�b�g������(ON)
#pragma config BORV = HI // �d���d���~���펞�Ď��d��(2.5V)�ݒ�(HI)
#pragma config LVP = OFF // ��d���v���O���~���O�@�\�g�p���Ȃ�(OFF)
// �w�肵������(num x o.1ms)�����E�G�C�g���s��������
void Wait(unsigned int num)
{
int i ;
// num�Ŏw�肵�������J��Ԃ�
for (i=0 ; i<num ; i++) {
__delay_us(100) ; // 100us�v���O�����̈ꎞ��~
}
}
// �X�e�b�s���O���[�^�Ƀp���X���o�͂��鏈����
// step : ��]������X�e�b�v�����w�肷��(�����l�Ȃ烂�[�^�͋t��]����)
// speed: ���[�^�̉�]���x���w�肷��AON������p���X�̕���0.1ms�P�ʂɎw��
// �p���X��ON���镝��Z������Ƒ��x���オ��܂��B
void StepperOut(int step,long speed)
{
unsigned char dt[4] = { 0b11000000 , 0b01100000 , 0b00110000 , 0b10010000 } ;
int c , cnt ;
cnt = 0 ;
if (step >= 0) {
c = 0 ;
// �w�肵���X�e�b�v�̐������J��Ԃ��A���[�^�͐��]����
while(cnt < step) {
LATB = (0b00001111 & LATB) | dt[c] ;
cnt++ ;
c++ ;
if (c > 3) c = 0 ;
Wait(speed) ; // �p���X��ON����o�͕�(���x)������
}
} else {
step = step * -1 ;
c = 3 ;
// �w�肵���X�e�b�v�̐������J��Ԃ��A���[�^�͋t�]����
while(cnt < step) {
LATB = (0b00001111 & LATB) | dt[c] ;
cnt++ ;
c-- ;
if (c < 0) c = 3 ;
Wait(speed) ; // �p���X��ON����o�͕�(���x)������
}
}
}
// ���C���̏���
void main()
{
OSCCON = 0b01110010 ; // �����N���b�N�͂W�l�g���Ƃ���
ANSELA = 0b00000000 ; // AN0-AN4�͎g�p���Ȃ��S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00000000 ; // AN5-AN11�͎g�p���Ȃ��S�ăf�W�^��I/O�Ƃ���
TRISA = 0b00000000 ; // �s��(RA)�͑S�ďo�͂Ɋ����Ă�(RA5�͓��݂͂̂ƂȂ�)
TRISB = 0b00000000 ; // �s��(RB)�͑S�ďo�͂Ɋ����Ă�
PORTA = 0b00000000 ; // RA�o�̓s���̏�����(�S��LOW�ɂ���)
PORTB = 0b00000000 ; // RB�o�̓s���̏�����(�S��LOW�ɂ���)
Wait(30000) ; // 3�b��ɊJ�n
while(1) {
StepperOut(4,100) ; // 4step��]�����A���x�̃p���X����10ms
}
}
---------------------------------------------------------------------
�C�R���p�C�����o�h�b�������������s���ĉ������B
while(1) {
StepperOut(4,100) ; // 4step��]�����A���x�̃p���X����10ms
}
�@�@�̕�����
StepperOut(288,100) ;
while(1) ;
�@�@�ɏ��������Č��ĉ�����
step1 step2 step3 step4
�@dt[4] = { 0b11000000 , 0b01100000 , 0b00110000 , 0b10010000 } ;
�@�܂��Astep4�`step1�Ƌt�ɏ����J��Ԃ��ďo�͂�����[�^�͋t��]���܂��B �@����ǂ͏�}�̔z���}�ɔ��Œ��R(�{�����[��)��
�@����ǂ͏�}�̔z���}�ɔ��Œ��R(�{�����[��)��
---------------------------------------------------------------------
#include <xc.h>
#define _XTAL_FREQ 8000000 // delay�p�ɕK�v(�N���b�N8MHz���w��)
int PreVal ; // �O��ǂݍ��ϒ�R�̒l��ۑ�����ϐ�
// �R���t�B�M�����[�V�����P�̐ݒ�
#pragma config FOSC = INTOSC // �����ۯ����g�p����(INTOSC)
#pragma config WDTE = OFF // �����ޯ����ϰ����(OFF)
#pragma config PWRTE = ON // �d��ON����64ms�����۸��т��J�n����(ON)
#pragma config MCLRE = OFF // �O��ؾ�ĐM���͎g�p���������ٓ���(RA5)��݂Ƃ���(OFF)
#pragma config CP = OFF // ��۸�����ذ��ی삵�Ȃ�(OFF)
#pragma config CPD = OFF // �ް���ذ��ی삵�Ȃ�(OFF)
#pragma config BOREN = ON // �d���d���~���펞�Ď��@�\ON(ON)
#pragma config CLKOUTEN = OFF // CLKOUT��݂�RA6��݂Ŏg�p����(OFF)
#pragma config IESO = OFF // �O���E�����ۯ��̐ؑւ��ł̋N���͂Ȃ�(OFF)
#pragma config FCMEN = OFF // �O���ۯ��Ď����Ȃ�(FCMEN_OFF)
// �R���t�B�M�����[�V�����Q�̐ݒ�
#pragma config WRT = OFF // Flash��ذ��ی삵�Ȃ�(OFF)
#pragma config PLLEN = OFF // ����N���b�N��32MHz�ł͓��삳���Ȃ�(OFF)
#pragma config STVREN = ON // �X�^�b�N���I�[�o�t���[��A���_�[�t���[�����烊�Z�b�g������(ON)
#pragma config BORV = HI // �d���d���~���펞�Ď��d��(2.5V)�ݒ�(HI)
#pragma config LVP = OFF // ��d���v���O���~���O�@�\�g�p���Ȃ�(OFF)
// �w�肵������(num x o.1ms)�����E�G�C�g���s��������
void Wait(unsigned int num)
{
int i ;
// num�Ŏw�肵�������J��Ԃ�
for (i=0 ; i<num ; i++) {
__delay_us(100) ; // 100us�v���O�����̈ꎞ��~
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ���
unsigned int adconv()
{
unsigned int temp;
GO_nDONE = 1 ; // �A�i���O�l�ǎ��J�n�w��
while(GO_nDONE) ; // �ǎ�芮���܂ő҂�
temp = ADRESH ; // PIC�͓ǎ�����l��ADRESH��ADRESL�̃��W�X�^�[�ɃZ�b�g����
temp = ( temp << 8 ) | ADRESL ;
return temp ;
}
// �X�e�b�s���O���[�^�Ƀp���X���o�͂��鏈����
// step : ��]������X�e�b�v�����w�肷��(�����l�Ȃ烂�[�^�͋t��]����)
// speed: ���[�^�̉�]���x���w�肷��AON������p���X�̕���0.1ms�P�ʂɎw��
// �p���X��ON���镝��Z������Ƒ��x���オ��܂��B
void StepperOut(int step,long speed)
{
unsigned char dt[4] = { 0b11000000 , 0b01100000 , 0b00110000 , 0b10010000 } ;
int c , cnt ;
cnt = 0 ;
if (step >= 0) {
c = 0 ;
// �w�肵���X�e�b�v�̐������J��Ԃ��A���[�^�͐��]����
while(cnt < step) {
LATB = (0b00001111 & LATB) | dt[c] ;
cnt++ ;
c++ ;
if (c > 3) c = 0 ;
Wait(speed) ; // �p���X��ON����o�͕�(���x)������
}
} else {
step = step * -1 ;
c = 3 ;
// �w�肵���X�e�b�v�̐������J��Ԃ��A���[�^�͋t�]����
while(cnt < step) {
LATB = (0b00001111 & LATB) | dt[c] ;
cnt++ ;
c-- ;
if (c < 0) c = 3 ;
Wait(speed) ; // �p���X��ON����o�͕�(���x)������
}
}
}
// ���C���̏���
void main()
{
int num , i ;
OSCCON = 0b01110010 ; // �����N���b�N�͂W�l�g���Ƃ���
ANSELA = 0b00000100 ; // AN2�̂݃A�i���O�g�p�A����AN0,1,3,4�͎g�p���Ȃ��f�W�^��I/O�Ƃ���
ANSELB = 0b00000000 ; // AN5-AN11�͎g�p���Ȃ��S�ăf�W�^��I/O�Ƃ���
TRISA = 0b00000100 ; // RA2�̂ݓ��́A���̃s��(RA)�͏o�͂Ɋ����Ă�(RA5�͓��݂͂̂ƂȂ�)
TRISB = 0b00000000 ; // �s��(RB)�͑S�ďo�͂Ɋ����Ă�
PORTA = 0b00000000 ; // RA�o�̓s���̏�����(�S��LOW�ɂ���)
PORTB = 0b00000000 ; // RB�o�̓s���̏�����(�S��LOW�ɂ���)
// �`�^�c�̐ݒ�
ADCON1 = 0b10010000 ; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/8�AVDD�����t�@�����X�Ƃ���
ADCON0 = 0b00001001 ; // �A�i���O�ϊ����ݒ�(AN2����Ǎ���)
__delay_us(5) ; // �A�i���O�ϊ���ݒ肳���܂łƂ肠�����҂�
PreVal = 0 ; // �O��l�͂O�Ƃ��ď�����
Wait(30000) ; // 3�b��ɊJ�n
while(1) {
// 1�ԃs��(AN2)����ϒ�R�̒l��30��ǂݍ��ݕ��ω�����
num = 0 ;
for (i=0 ; i < 30 ; i++) {
num = num + adconv() ;
}
num = num / 30 ; // �ϒ�R����̒l������l�Ƃ���
// �X�e�b�s���O���[�^�ɏo�͂���
StepperOut(num - PreVal,100) ; // ����l�|�O��l�̒l������]������
PreVal = num ; // ����l��O��l�Ƃ��ĕۑ�����
}
}
---------------------------------------------------------------------
num = 0 ;
for (i=0 ; i < 30 ; i++) {
num = num + adconv() ;
}
num = num / 30 ; // �ϒ�R����̒l������l�Ƃ���
�ƁA���Œ��R�̒l��30��ǂݍ��ݕ��ω����Ă��܂����A
num = adconv() ;
�ǂ��ł��傤�H�A�����Ԃ[�^�̉�]���t���t�����Ă��đ��삵�ɂ����Ǝv���܂��B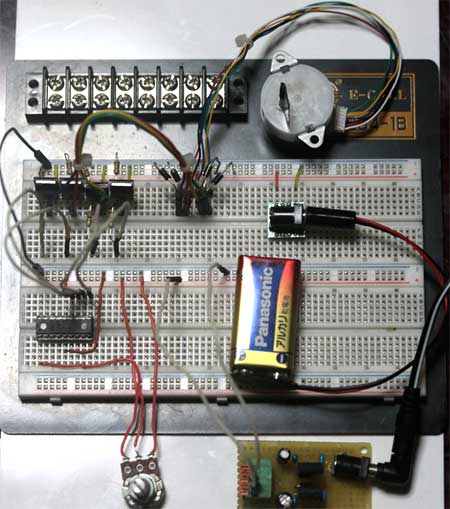
�����N�ꌩ����(*4) 2017/01/12
�NjL(*3) 2016/09/27
MPLAB X�p�ɋL���ύX(*2) 2015/10/27
�NjL(*1) 2014/06/22
�y���ޒ��H�[�K���[�W�n�E�X�z
Copyright (C) 2006-2020 Shigehiro Kimura All Rights Reserved.