�X�e�b�s���O���[�^�����Ă݂܂�(Arduino��)
�k�}�C�R���̃g�b�v�ɖ߂�l
�O���̓T�[�{���[�^�����Ă݂܂����A���̕łł�Arduino���g���ăX�e�b�s���O���[�^�����܂��B
���APIC���g���ăX�e�b�s���O���[�^�����L���������������ĉ������B
�X�e�b�s���O���[�^�͏H���d�q���������ōw�����܂����B
���̃��[�^�́A�㎥�������Q�����j�|�[�����P��](360�x)��288�X�e�b�v(1step 1.25�x)�ł��A���͓d����12V���|����500mA���炢�����l�ł��B
�Ȃ̂ŁA���̕łł̓��j�|�[���^�C�v�̃X�e�b�s���O���[�^�ɂ��ď����Ă��܂��B
�� 2017/01/12���݁A�����Ŏg�p�����X�e�b�s���O���[�^�͔̔��I���̗l�ł��B
�@�@�������Ŏ������܂��傤�A�A���A�P��](360�x)��200�X�e�b�v(1step 1.8�x)�ł��B�@*3)
�@�@���A���[�^�̐��F���قȂ�܂��A��->�ԁA��->���A��->�A��->���A��->���A��->���ƓǑւ��܂�
�X�e�b�s���O���[�^�ƃT�[�{���[�^�̔�r
|
�X�e�b�s���O
���[�^ |
RC�T�[�{���[
�^ |
| ���� |
�����p���X����x�Ɉ��̊p�x������]���܂��B
�Ⴆ�A����̃��[�^�Ȃ烏���p���X(1step)��1.25�x��]�ł��B |
����p���X��ON�����镝�ɂ���]�p�x�����܂�܂��B |
| ��] |
�A����]OK
����̃��[�^��288�X�e�b�v�łP��]�Ȃ̂ŁA
864�p���X����R��]���Ď~�܂�܂��B
�܂��A�p���X��ON�����镝��ς���Ɖ�]���x���ς��܂��B |
�O�`180�x�܂ł̉�]�ł��B
(360�x��]���镨������)
��]���x�͐���s�A���[�^�Ɉˑ����܂��B |
| ���x |
��~���x�͒Ⴍ���[�^�Ɉˑ����܂��B
�Ⴆ�A����̃��[�^�Ȃ�1.25�x�܂��ł��B |
��~���x�͍���
�����ɃG���R�[�_���L��̂ŏ�ɒ�~�ʒu���L�[�v����(�t�B�[�h�o�b�N����)�B |
| �g���N |
�ᑬ��ł̃g���N���傫���A����]�ɂȂ�g���N��������
�Ȃ�A���̂�����]���Ȃ��Ȃ�B |
�ᑬ�`������Ńg���N�����肵�Ă���B |
| ��H |
FET���Ńh���C�o�[�����K�v������B
(�}�C�R���ւ̔z���͂S�{�F�Q����) |
�ȒP�A���i�s�v
(�}�C�R���ւ̔z���͂P�{) |
| ���i |
���� |
���� |
�s �z���} �t
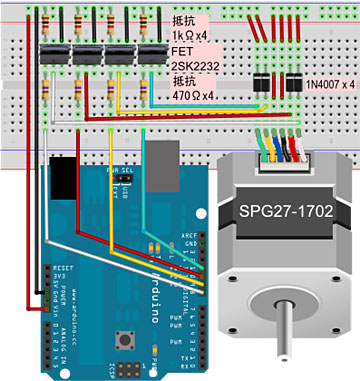 ���̍��}�����Ԕz���}�ł��B
���̍��}�����Ԕz���}�ł��B
��������u�e�d�s���}�C�R���o�͂̃X�C�b�`�Ƃ��Ďg�����@�v
�����킹�ēǂ�ł����܂��傤�B
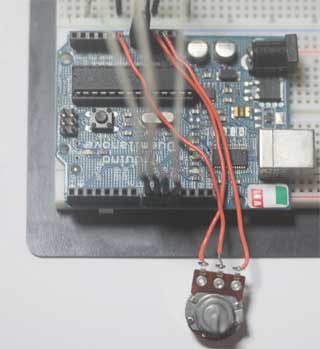
���p���郂�[�^�ɂ́A�ڑ�����ׂ̃R�l�N�^�[�P�[�u�����t�����Ă��܂��A
�u���b�h�{�[�h�ɂ��̂܂h���Ȃ����Ȃ��̂ł����w�b�_�[�s��������ɔ��c�t�������ق����ǂ��ł��傤�B
Arduino�͊O���d�r�X�u��ڑ����Ă��܂��A�Ȃ̂Ń��[�^�̓d���͂X�u�ł̎����ł��B
�t�r�a����̓d���ŋ쓮������͎̂~�߂܂��傤�B
Arduino��Vin�[�q�͊O���d�r�X�u�d�������̂܂o�͂���Ă��܂��B
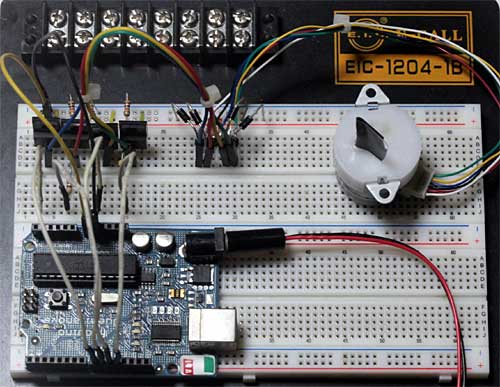
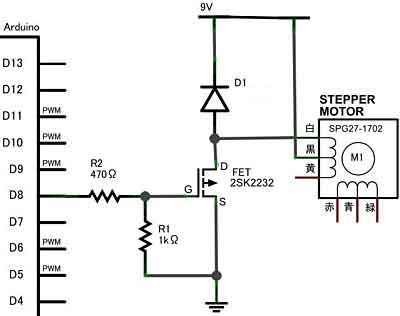 ���}�̗l��Arduino�f�W�^���W�Ԓ[�q����
���}�̗l��Arduino�f�W�^���W�Ԓ[�q����
�e�d�s����ă��[�^�̔��F���ɐڑ�����Ă��܂��˂��ꂪ�P��H���ł��B
�f�W�^���X�Ԓ[�q���烂�[�^�̉��F���A
�f�W�^���P�O�Ԓ[�q���烂�[�^�̐ԐF���A
�f�W�^���P�P�Ԓ[�q���烂�[�^�̗ΐF���A
�ƑS���łS��H�L��܂��B
���[�^�̍��F���ƐF���́{�d��(9V)�ɐڑ��ł��B
�X�e�b�s���O���[�^�̐�����@�ɂ���
 ���̗l�ɂQ��H�������n�m������������Q���㎥�����ƌ����܂��B
���̗l�ɂQ��H�������n�m������������Q���㎥�����ƌ����܂��B
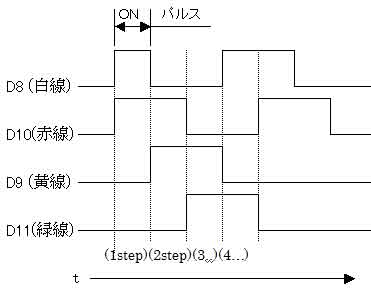
�����p���X�P��������������1.25�x��]���܂��B
�p���X��ON���镝��Z������ƃ��[�^�̉�]���x���オ��܂��B
���A�X�e�b�s���O���[�^�̏ڂ�������̘b�́A
�uPIC�ŗV�ԓd�q�H��v������u�X�e�b�s���O���[�^�̐���v��@*3)
��G�t�e�b�N�������������X�e�b�s���O���[�^���
���Q�l�ɂ��ĉ������B
�����ł�Arduino���W�����C�u������Stepper���C�u�����𗘗p���ăv���O�������Ă��܂��B
�sarduino�̃X�P�b�`�P�t
�@��L�̉�H�̗l�ɔz�����s���܂��B
�@(������Arduino����̓d�����AVin��GND�[�q�͐ڑ����Ȃ��Œu��)
�Aarduino�{�[�h(Arduino Duemilanove 328)��USB�P�[�u���Őڑ�����arduino IDE���N�������܂��B
�B�h�c�d�ɉ��L�̃X�P�b�`�v���O�������R�s�[�y�[�X�g���ē\��t���ĉ������B
---------------------------------------------------------------------
#include <Stepper.h>
#define STEPS 288 // �X�e�b�s���O���[�^�̂P��]������̃X�e�b�v��
Stepper Motor(STEPS, 8, 9, 10, 11) ; // stepper�N���X�̃C���X�^���X������
void setup()
{
Motor.setSpeed(40) ; // ���[�^�̑������̉�]��(RPM)�Őݒ肷��
}
void loop()
{
Motor.step(4) ; // �S�X�e�b�v�̂݉�]������
}
---------------------------------------------------------------------
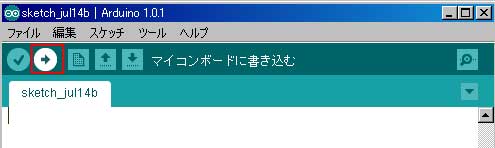
�C�h�c�d�c�[���o�[�̐Ԙg�����Upload��{�^�����N���b�N���ăR���p�C����arduino�{�[�h�ɏ����݂�
�@�s���܂��B
�D�t�r�a�P�[�u�����O����Arduino�d��(Vin/GND)��ڑ����A�X�u�O���d�r�����t���܂��傤�A
�@���[�^���A����]����Ǝv���܂��B
�@���L�ɁA��L�X�P�b�`�Ŏ��s���������̏o�͔g�`���Q�l�ɓ\��t���Ēu���܂��B�@*1)
���]�o��(����->�ԉ�->����->���� ��4step�J��Ԃ�)
![�o�͔g�`(���])](stepping16-1.jpg)
�t�]�o��(����->����->�ԉ�->���� ��4step�J��Ԃ�)
![�o�͔g�`(�t�])](stepping16-2.jpg)
�X�P�b�`�ɂ���
Stepper�@Motor(STEPS, 8, 9, 10, 11)
�@�X�e�b�s���O���[�^�̃��C�u�����[�����܂��AMotor�̖��O�͎��R�ɕύX�o���܂��B
�@STEPS�̓��[�^�̂P��]������̃X�e�b�v���Ȃ̂Ŋe���[�^�ɂ��قȂ�܂��B
�@8(��),9(��),10(��),11(��)�͐ڑ����Ă��郂�[�^�̃f�W�^���[�q�ԍ��ł��B
Motor�DsetSpeed(40)
�@�X�e�b�s���O���[�^�̉�]���x��ݒ肵�܂��B
�@1���Ԃ����艽��]����̂����w�肵�܂����A������]���ɂ���ƃ��[�^�͉��Ȃ��Ȃ�܂��A
�@����̃��[�^��25�`65�ӂ肪�悳���ł��B
Motor�Dstep(4)
�@���̊��Ŏ��ۂɃ��[�^����]���܂��A�w�肷�鐔�l�̓X�e�b�v���ł��B
�@�����A864�Ǝw�肵���獡��̃��[�^���ƂR��](288x3)���Ď~�܂�܂��A
�@�Ȃ̂�864�X�e�b�v���s����܂ł͂��̊��͏I�����܂���A���ӂł��B
�@(���Ď��͏I������܂ł͎��̃v���O���������s���Ȃ��ƌ������ł�)
�@�܂��A-864�ƃ}�C�i�X���l���w�肵����t��]���܂��A-32767�`32767�͈̔͂ł��B
�@����̃X�P�b�`�͂S�X�e�b�v���삪�J��Ԃ����s������̂ʼn�]�����܂܂ƂȂ�܂��B
�@�� ��~���́A�R�C���ɓd���𗬂��Ă��Ȃ��̂Ńt���[������ԂŃg���N�͊|�����Ă��܂���B
�sarduino�̃X�P�b�`�Q�t
 �@����ǂ͏�}�̔z���}�ɔ��Œ��R(�{�����[��)��
�@����ǂ͏�}�̔z���}�ɔ��Œ��R(�{�����[��)��
�@�lj��z�����ĉ������B
�@���̃X�P�b�`�ł̓A�i���O�O�Ԓ[�q�ɔ��Œ��R��
�@�ڑ������ꍇ�̗�ł��B
�@���ʐ^���ϒ�R��lj������ꍇ�̗�ł��B
�@���A���Œ��R�̐ڑ����@�����������Q�l�ɂ���
�@�������B
�@���̃X�P�b�`�����Ă݂܂��傤�A���Œ��R��
�@�E�ɉΉ����������[�^���E�ɉ�]���܂��A
�@���Œ��R�����ɉ��[�^�����։�]�ł��A
�@���Œ��R�̉�]���~�߂���[�^����~���܂��B
�@�i���[�^��~��ԂŔ����Ƀt���t�����Ă��܂����A
�@����͔��Œ��R�̓ǎ��l���ӂ���Ă��邩��
�@�ł��j
�@���Œ��R�ƃ��[�^�̉������t�̏ꍇ�́A
�@���Œ��R�́{�d���Ƃf�m�c�������ւ��ĉ������B
---------------------------------------------------------------------
#include <Stepper.h>
#define STEPS 288 // �X�e�b�s���O���[�^�̂P��]������̃X�e�b�v��
int PreVal ; // �O��ǂݍ��ϒ�R�̒l��ۑ�����ϐ�
Stepper Motor(STEPS, 8, 9, 10, 11) ; // stepper�N���X�̃C���X�^���X������
void setup()
{
Motor.setSpeed(40) ; // ���[�^�̑������̉�]��(RPM)�Őݒ肷��
PreVal = 0 ; // �O��l�͂O�Ƃ��ď�����
}
void loop()
{
int x ;
x = analogRead(0) ; // �ϒ�R����̒l��ǂݍ��ݍ���l�Ƃ���
Motor.step(x - PreVal) ; // ����l�|�O��l�̒l������]������
PreVal = x ; // ����l��O��l�Ƃ��ĕۑ�����
}
---------------------------------------------------------------------
�sarduino�̃X�P�b�`�R�t
���̃X�P�b�`����X�P�b�`�Q�̗l�ɔ��Œ��R��lj������ꍇ�̗�ł��B
���̃X�P�b�`���������Ă݂܂��傤�A����ǂ͔��Œ��R���ƃ��[�^�̉�]���x���ς��܂��B
���x����������Ɖ��Ȃ��Ȃ�܂��A���̃��[�^��25�`65���ǂ����Ȃ̂ŁA0-100��25-65�ƕς��Ă��ǂ��ł��傤�B
---------------------------------------------------------------------
#include <Stepper.h>
#define STEPS 288 // �X�e�b�s���O���[�^�̂P��]������̃X�e�b�v��
Stepper Motor(STEPS, 8, 9, 10, 11) ; // stepper�N���X�̃C���X�^���X������
void setup()
{
}
void loop()
{
int x ;
x = analogRead(0) ; // �ϒ�R����̒l��ǂݍ���
x = map(x, 0, 1023, 0, 100) ; // �ϒ�R�l(0-1023)�x�l(0-100)�ɕϊ�����
Motor.setSpeed(x) ; // ���[�^�̑�����ݒ肷��
Motor.step(4) ; // 4Step������]������
}
---------------------------------------------------------------------
�s ���̑� �t
�@�������i�̎ʐ^
���[�^�̉�]������Ղ��l�ɁA���ɂ̓e�[�v�������ėL��܂��A�K���ȉ�]���ʼnȂ��ƃ��[�^��
���\�U�����L��܂��B
�O���d���P�Q�u�ł��s���Ă݂܂����A��]���x���オ����肵�Đ��䂵�₷���l�Ɋ����܂��A
�܂��A�S�D�T�u�ł��s���܂��������ɂ͉��܂��A�����ɑg�ݍ��ޏꍇ�͂P�Q�u�d�����ǂ������ˁB
���A�o�C�|�[���X�e�b�s���O���[�^�h���C�o��L6470���g�����L����PIC�ł̓��e�ł���
���������Q�Ɖ������B*2)
�����N�ꌩ����(*3) 2017/01/12
�NjL(*2) 2016/09/27
�NjL(*1) 2014/06/22
�y���ޒ��H�[�K���[�W�n�E�X�z
Copyright (C) 2006-2020 Shigehiro Kimura All Rights Reserved.