�T�[�{���[�^�����Ă݂܂�
�k�}�C�R���̃g�b�v�ɖ߂�l
�����ł͎Y�Ƌ@�B���ŗ��p����Ă���T�[�{���[�^�ł͂Ȃ��A�z�r�[�p�r�̃T�[�{���[�^���Ă݂܂��A
�z�r�[�p�r�̃T�[�{���[�^�ƌ������W�R�����n�߁A�ŋ߂ł�2�����s���{�b�g�̊ߗp�ɗ��p����Ă��܂��ˁB
���͂��A�m�荇������q�b�T�[�{���[�^�������̂ł��A�Ȃ�A�������Ă݂邩�����Ă�ł��A�L���ɂ��܂����B
Arduino��Servo���C�u�������L��̂ł���𗘗p������ȒP�ɓ��삳�����܂��A
Arduino�ł�Servo���C�u�����g�p���@�����z�����H��[�~�Q�O�O�W������������g�o���Q�Ɖ������B
���̕łł�PIC(12F1822)���g���ăT�[�{���[�^�����Ă݂܂��B
�T�[�{���[�^�ׂĂ݂�ƁA���������H���d�q��������(S03N 2BBM/�t�^�o)�Ŕ̔�����Ă��܂����B
��̕��͔̔��y�[�W���Ȃ��Ȃ��Ă���̂ŁA������(S03N 2BBM/JR)���ڂ��Ēu���܂��B�@*3)
�ڑ�����3�[�q�L��AGND(����)�A5V(�Ԑ�)�A�M����(����)�̃t�^�o�^�C�v�d�l�ł��A
����JR�^�C�v�d�l���L��AGND(����)�A5V(�Ԑ�)�A�M����(�I�����W��)�ŐM���̔z��͓����ł��B
���A������@�������ŁA�t�^�o�^�C�v�̓R�l�N�^�̋t�}���h�~���L��l�ł��B�@*3)
�T�[�{���[�^�ɂ���Ă�360����]���镨���L��悤�ł����A���̃T�[�{���܂ݒʏ��180���܂łł��B
360�����̘A����]��������ɂ̓X�e�b�s���O���[�^�𗘗p����̂ł͂Ȃ����Ǝv���܂��B
���A�X�e�b�s���O���[�^�����L���������������ĉ������B
PS.�@*4)
PIC�̎��Ӄ��W���[��PSMC���g���A�ʏ��180���^�C�v��360����]�^�C�v�̃T�[�{���[�^�삳����
�L�����������ɏ����܂����B
Fosc��16MHz�ŏo���āA�T�[�{���[�^��3/4����\�ő��삵�₷���A�v���O�������X�b�L���Ȃ̂�
�����߂������B
�T�[�{���[�^�̐�����@�ɂ���
�������ɂ��o�v�l�M�����T�[�{���[�^�̐M�����ɏo�͂���Ηǂ������ł��B
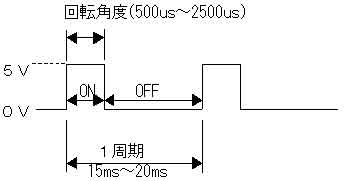 ���}�̗l�ɂP������20ms(50Hz)�̃p���X�M�����o�͂��܂��B
���}�̗l�ɂP������20ms(50Hz)�̃p���X�M�����o�͂��܂��B
�p���X��ON�����镝���ς����邱�Ƃɂ�胂�[�^��]���̊p�x�����܂�܂��B
����̂��̃T�[�{���[�^�ł������������A�������A
1520us��90������(�j���|�g����)�ʒu�ł��B
630us�Œ������玞�v�������ɍX��90����]���A
2350us�Œ������甽���v��������-90����]���܂��B
����Đ��䂷�镝��630us�`2350us�ɂ��܂������A�e�T�[�{���[�^�ɂ�蒲�����܂��傤�B
�@�@![��]�}](servo3.jpg)
0���ʒu
90���ʒu
180���ʒu
�P����20ms�����ɂ�50Hz��PWM�M�����쐬����Ηǂ��̂ŁAPIC��CCP1�@�\(PWM)�𗘗p�g�p�Ǝv��
�����̐ݒ�l���v�Z������50Hz�����ɂ�PIC�̃��C���N���b�N���PMHz�ȉ��ɂ��Ȃ��Ƃ��߂ł��A
���A�����`�A���̋@��𐧌䂵���肷��̂��l����Ƃ��A�Ȃ��A����ł��˂��B
������A�P�U�r�b�g�^�C�}�[��TIMER1���g�����荞�݂ŏ���������@��I�т܂����B
���A�Ⴆ�Ό��� 90�������ʒu�ɉ�]�����L��Ƃ��āA630us���o�͂����Ƃ��܂��B
����ƃT�[�{���[�^�͎��v�������� 90����]���܂����A
��]���I���O��PWM�M�����r�₦��� 90���͉�]�����ɓr���Œ�~���Ă��܂��܂��B
PWM�M�����o�Ă��Ȃ���Ԃ̓��[�^�̓t���[��Ԃł��A�͂������ƃ��[�^���ʒu�͂���܂��A
PWM�M�����o�Ă���ƃT�[�{���[�^�͎��ʒu������Ă����̈ʒu�ɖ߂낤�Ƃ��܂��A
���[�^������ʼn�]�����Ă݂ĉ��������̈ʒu�ɓ������Ƃ��܂��B(���܂�͓͂���Ȃ��ł�)
�s �z���} �t
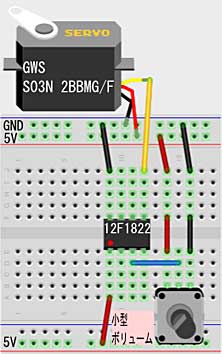 �@���}�T�[�{���[�^�ł̓��[�h�����ԁE���E�I�����W(JR�^�C�v)�ł����A
�@���}�T�[�{���[�^�ł̓��[�h�����ԁE���E�I�����W(JR�^�C�v)�ł����A
�@����g�p�̕��͐ԁE���E��(�t�^�o�^�C�v)�ł��B
�@������̐F���قȂ��Ă��܂��B
�@���A�T�[�{���[�^�̐�����́APIC��RA2(5�ԃs��)�f�W�^���o��
�@�ɂȂ����Ă��܂��B
�@���������̂g�o�ŗ��p���Ă���g���}�[�^�C�v�̉ϒ�R�łȂ��A
�@�܂݉Ղ��̂ŏ��^�̃{�����[���^�C�v���g�p���Ă��܂��B
�@�莝����500K�����g���܂�������R�l�͓K���ŗǂ����Ǝv�ӁB
�@(�o����Ȃ�A�i���O���͂�0-1023�܂œ��͏o���镨���ǂ���)
�@���A�{�����[���̒����[�q��PIC��AN3(3�ԃs��)�A�i���O����
�@�ɂȂ����Ă��܂��B
�@���̃{�����[���͍��łO�����A�E��1023�����̒l��
�@�����܂��B
�@�T�[�{���[�^���q�����ꍇ�ɂǂ��Ȃ邩�C�ɂ����鏊�ł���
�@�P�����Ȃ��̂ł��̂�����ɓ��ꂽ�����Č��悤�Ǝv����.........
�s�T���v���v���O�����t
�@��L�z���}��ʂ̗l�ɔz�����܂��傤�B
�AMPLAB X(v2.15)���N�������܂��B�@*2)
�B���L��PIC12F1822�ł̃T���v���̃v���O�����\�[�X�ł��A
�@ MPLAB(R) XC8 C Compiler Version 1.32�R���p�C�����g�p���Ă��܂��B
�@ �v���W�F�N�g���쐬�����V�K�t�@�C���ɃR�s�[�y�[�X�g���ē\��t���ĉ������B�@*2)
---------------------------------------------------------------------
#include <xc.h>
#include <stdlib.h>
#define _XTAL_FREQ 8000000 // delay�p�ɕK�v(�N���b�N8MHz���w��)
#define SERVO_PIN RA2 // �T�[�{���[�^�ɐڑ����Ă���s���ԍ�
int TMR1ON_Flag ; // �^�C�}�[�̊��荞�ݑ҂��t���O
// �R���t�B�M�����[�V�����P�̐ݒ�
#pragma config FOSC = INTOSC // �����ۯ��g�p����(INTOSC)
#pragma config WDTE = OFF // �����ޯ����ϰ����(OFF)
#pragma config PWRTE = ON // �d��ON����64ms�����۸��т��J�n����(ON)
#pragma config MCLRE = OFF // �O��ؾ�ĐM���͎g�p���������ٓ���(RA3)��݂Ƃ���(OFF)
#pragma config CP = OFF // ��۸�����ذ��ی삵�Ȃ�(OFF)
#pragma config CPD = OFF // �ް���ذ��ی삵�Ȃ�(OFF)
#pragma config BOREN = ON // �d���d���~���펞�Ď��@�\ON(ON)
#pragma config CLKOUTEN = OFF // CLKOUT��݂�RA4��݂Ŏg�p����(OFF)
#pragma config IESO = OFF // �O���E�����ۯ��̐ؑւ��ł̋N���͂Ȃ�(OFF)
#pragma config FCMEN = OFF // �O���ۯ��Ď����Ȃ�(OFF)
// �R���t�B�M�����[�V�����Q�̐ݒ�
#pragma config WRT = OFF // Flash��ذ��ی삵�Ȃ�(OFF)
#pragma config PLLEN = OFF // ����N���b�N��32MHz�ł͓��삳���Ȃ�(OFF)
#pragma config STVREN = ON // �X�^�b�N���I�[�o�t���[��A���_�[�t���[�����烊�Z�b�g������(ON)
#pragma config BORV = HI // �d���d���~���펞�Ď��d��(2.5V)�ݒ�(HI)
#pragma config LVP = OFF // ��d���v���O���~���O�@�\�g�p���Ȃ�(OFF)
// �^�C�}�[�P�����݂̏���
void interrupt InterTimer( void )
{
if (TMR1IF == 1) { // �^�C�}�[1�̊����ݔ������H
TMR1ON_Flag = 0 ;
TMR1IF = 0 ; // �^�C�}�[�P�����t���O�����Z�b�g
}
}
// �A�i���O�l��ǂݍ��ޏ���
unsigned int adconv()
{
unsigned int temp;
GO_nDONE = 1 ; // PIC�ɃA�i���O�l�ǎ��J�n���w��
while(GO_nDONE) ; // PIC���ǎ�芮������܂ő҂�
temp = ADRESH ; // PIC�͓ǎ�����l��ADRESH��ADRESL�̃��W�X�^�[�ɃZ�b�g����
temp = ( temp << 8 ) | ADRESL ; // 10�r�b�g�̕���\�͂ł�
return temp ;
}
// �}�b�v��(���鐔�l���瑼�̐��l�փ��x���ϊ����s��)
long map(long x, long in_min, long in_max, long out_min, long out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min ;
}
// �T�[�{���[�^�ɏo�͂��s������(�P�T�C�N���̂ݏo��)
// value : ��]�p�x�ɉ������p���X�̕����w�肷��(�P�ʂ͂���)
void ServoOut(int value)
{
unsigned int c ;
c = 65536 - value ;
TMR1H = (c >> 8) ; // �p���X��(ON)�̎���(us)��ݒ�
TMR1L = (c & 0x00ff) ; // �P�J�E���g�͂Pus�ł�
TMR1ON_Flag = 1 ;
SERVO_PIN = 1 ; // �p���X�n�m
TMR1ON = 1 ; // �^�C�}�[�P�J�E���g�J�n
while(TMR1ON_Flag == 1) ;// �ݒ肵�����ԂŊ��荞�݂���������܂ő҂�
TMR1ON = 0 ; // �^�C�}�[�P�J�E���g��~
SERVO_PIN = 0 ; // �p���X�n�e�e
__delay_us(17000) ; // �ʏ�� 20ms - ON���� �����ł��� 17ms�ɌŒ�
}
// ���C���̏���
void main()
{
unsigned int num , x , i ;
OSCCON = 0b01110010 ; // �����N���b�N��8�l�g���Ƃ���
ANSELA = 0b00010000 ; // �A�i���O��AN3���g�p���A�c������ׂăf�W�^��I/O�Ɋ���
TRISA = 0b00011000 ; // AN3(RA4)/RA0�������͂��̑��̃s���͏o�͂Ɋ����Ă�(RA3�͓��͐�p)
PORTA = 0b00000000 ; // �o�̓s���̏�����(�S��LOW�ɂ���)
// �`�^�c�̐ݒ�
ADCON1 = 0b10010000 ; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/8�AVDD�����t�@�����X��
ADCON0 = 0b00001101 ; // �A�i���O�ϊ����ݒ�(AN3����Ǎ���)
__delay_us(5) ; // �A�i���O�ϊ���ݒ肳���܂łƂ肠�����҂�
// �^�C�}�[�P�̐ݒ�(�P�J�E���g�͂Pus�Őݒ�)
T1CON = 0b01110000 ; // �����ۯ�(8MHz)��TIMER1���Ă���A��ؽ����Ēl 1:8
TMR1IF = 0 ; // �^�C�}�[1�����t���O��0�ɂ���
TMR1IE = 1 ; // �^�C�}�[1���荞�݂�������
PEIE = 1 ; // ���ӑ��u���荞�݂�������
GIE = 1 ; // �S���荞�ݏ�����������
__delay_ms(3000) ; // �R�b��Ɏ��s����
while(1) {
// 3�ԃs��(AN3)����ϒ�R�̒l��ǂݍ���
num = adconv() ;
// �ǂl(0-1023)���o�͂���p���X��ON���l(2350-630)�ɕϊ�����
x = map(num,0,1023,2350,630) ;
// �T�[�{���[�^�ɏo�͂���
ServoOut(x) ;
}
}
---------------------------------------------------------------------
�C�R���p�C�����o�h�b�������������s���ĉ������B
�DPIC���u���b�h�{�[�h�Ɏ�t���ă{�����[�������̕����ɃT�[�{���[�^�������Ǝv���܂��B
�@�{�����[���̉����Ƌt�ɓ����ꍇ�́H
�@�{�����[���̔z���A5V �� GND �����ւ��ĉ������A
�@���́Ax = map(num,0,1023,2350,630) �� x = map(num,0,1023,630,2350) �Ə������ĉ������B
�`�^�c�̐ݒ�ɂ���
�A�i���OI/O
�@�A�i���O�s���̐ݒ�͉��L�̃��W�X�^�[�ɂĐݒ肵�܂��B
�@ANSELA = 0b00010000 ;�@�A�i���O���͂��s���s���̎w������܂�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�Ԑ����E����AN0(7���),AN1(6���),AN2(5���),AN3(3���)�̏�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@1�ŃA�i���O�A0�Ńf�W�^���A���̐ݒ���AN3���A�i���O�Ŏg�p����B
�@�w�肵��AN3�̃A�i���O�s������͂Ɏw�肷��ɂ͉��L�̃��W�X�^�[�ɂĐݒ肵�܂��B
�@TRISA = 0b00010000 ;�@���̐ݒ��AN3�̂ݓ��͂ɐݒ肷��ł��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@1�œ��́A0�ŏo�́A�E����AN0,AN1,AN2,x,AN3
�A�i���O�ϊ����ݒ�
�@ADCON1 = 0b10010000 ;�@�ΐ���������A/D�ϊ����̃��t�@�����X�d�����ǂ����邩�̐ݒ�ł��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@00�FVDD��PIC�d�����g�p����B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@10�F6�ԃs���ڑ��̊O��VREF���g�p����B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@11�FPIC�����̌Œ�d�������悤����B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�Ԑ���������A/D�ϊ����s�����x�̃N���b�N��ݒ肵�܂��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@000�FFOSC/2�@001�FFOSC/8�@ 010�FFOSC/32
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@100�FFOSC/4�@101�FFOSC/16�@110�FFOSC/64
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���A����ȊO�̐��������̐ݒ�͍��̂܂g�p���ĉ������B
�@ADCON0 = 0b00001101 ;�@���̐ݒ��AN3����Ǎ��߂Ǝw�����Ă��܂�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@����AN3�ȊO����Ǎ��݂����ꍇ�́A�Ԑ����̕�����ύX���܂��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@AN0=00000,AN1=00001,AN2=00010,AN3=00011�ƕύX���ĉ�����
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�Ԑ����̕����ȊO�̐ݒ�͍��̂܂g�p���ĉ������B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���AADCON0�̐ݒ�ɂ�5us��������܂��Adelay�����Ēu���܂��傤
adconv()
�@�A�i���O�̒l��ǂݎ��܂��A�l�͂O�`�P�O�Q�R(0V�`5V)�͈̔͂ł��B
�@�ϒ�R��ɂ���Ă�0-1023�ł͂Ȃ��Ⴆ��60-530�͈̔͂������肵���肵�܂��A
�@�i���̗l�ȏꍇ�T�[�{���[�^���O���`180���܂œ��삵�܂���j
�@���̏ꍇ�́Ax = map(num,0,1023,2350,630) �� x = map(num,60,530,2350,630) ��
�@�ύX���܂��傤�A�O���`180���܂œ��삷��l�ɂȂ�܂��B
�^�C�}�[�P�̐ݒ�ɂ���
T1CON�̐ݒ�
�@T1CON = 0b01110000 ;
�@����������Timer1�̃N���b�N�\�[�X��I�����܂��B
�@�@00 = Fosc/4�@�@01 = Fosc�@�@10 = �O�����́@�@11 = �����̗e�ʌ��m�I�V���[�^ (CAPOSC)
�@�ΐ��������Ńv���X�P�[���̐ݒ���s���܂��B
�@�@00 = 1:1�@�@01 = 1:2�@�@10 = 1:4�@�@11 = 1:8
�@�Ԑ��������@�P=TIMER1�삳����@�O=TIMER1�삳���Ȃ�
�����J�E���g�̎��Ԍv�Z
�@�@�i�P�^�V�X�e���N���b�N���g���j x�@�v���X�P�[���ݒ�l
�@�V�X�e���N���b�N���W�l�g���Ń����J�E���g�P�����ɂ������ꍇ��
�@�N���b�N�\�[�X�� 01 = Fosc �Ńv���X�P�[���̐ݒ肪 11 = 1:8 �Ȃ�
�@�i�P�^�W�l�g���j�� �W�@�� �P����
�@�T�[�{���[�^�ւ̏o�̓p���X�n�m���� 1520us �o�������ꍇ��
c = 65536 - 1520 ; // c = 64016
TMR1H = (c >> 8) ; // �p���X��(ON)�̎���(us)��ݒ�
TMR1L = (c & 0x00ff) ; // �P�J�E���g�͂Pus�ł�
�@64016 ���� 65536 �܂ŃJ�E���g�A�b�v���Ă��� 65536 �Ŋ��荞�݂��������܂��B
__delay_us(17000)
�@�P�T�C�N��(20ms/50Hz)�ł̃p���X�n�e�e���Ԃ́A�Q�O����-�p���X�n�m���ԂȂ̂�
�@�Ⴆ�A1520ms �����n�m���o�͂�����A20000-1520=18480ms �n�e�e����Ηǂ����A
�@__delay_us()�͕ϐ����g���Ȃ��A�Ȃ̂�__delay_us(17000)�ŌŒ肵�܂��B
���ɂ���
ans = map(long x, long in_min, long in_max, long out_min, long out_max)�@*1)
�@�@�w�肵�����l( x )���A���̐��l�͈�(out_min�`out_max)�փ��x���ϊ����s������
�@�@x �F �ϊ����������l���w�肵�܂�
�@�@in_min �F �ϊ����鐔�l�̍ŏ��l
�@�@in_max �F �ϊ����鐔�l�̍ő�l
�@�@out_min �F �ϊ��㐔�l�̍ŏ��l
�@�@out_max�F �ϊ��㐔�l�̍ő�l
�@�@ans �F �ϊ��������ʂ̐��l��Ԃ��܂�
�@�@��j
�@�@long x ;
�@�@x = map(512,0,1023,2350,630) ; // ����1476�ƂȂ�
�@�@x = map(1100,0,1023,2350,630) ; // ����630�ƂȂ�
ServoOut(int value)
�@�@�T�[�{���[�^��PWM�M�����P�T�C�N��(�P����)�o�͂��܂��B
�@�@value�F �n�m����p���X�̕����w�肵�܂�(630us-2350us)
�@�@�@�@�@�@ 630us-2350us�͈͈̔ȊO�̐��l���w��\�ł��A�T�[�{���[�^�ɂ���Ē������܂��傤�B
�@�@�@�@�@�@ �͈͈ȊO�̐��l���T�[�{���[�^�ɗ^�����ꍇ�͉���\�����L��܂��B
�@�@�T�[�{���[�^��z������[�q��ς������ꍇ��
�@�@#define�@SERVO_PIN�@RA2�@�@// �T�[�{���[�^�ɐڑ����Ă���s���ԍ�
�@�@�̍s RA2(�f�W�^���o��) ��ύX���܂��傤�B
�s ���̑� �t
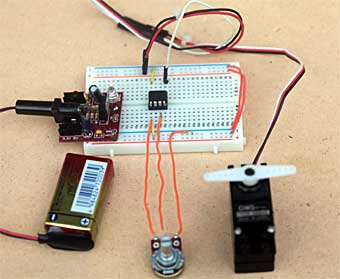 �@�������i�̎ʐ^�ł��B
�@�������i�̎ʐ^�ł��B
�@�d�r�͐V�i���I
�@�ŏ��͌Â��d�r�œ����Ȃ��Y������
�@�T�[�{���[�^�𑝂₷�ꍇ�͂��̌�����
�@ServoOut()���𑝂₹�n�j�Ǝv���܂���
�@�P�����Ȃ��̂łɂ��Ƃ��ł��B
�@�܂��A�T�[�{���[�^�����쎞�̓d���𑪂�����
�@��150mv���d���~�����L�����̂ő���Ȃ��
�@�ʓd�����̍l�����K�v�����B
����ȍ~�̓X�e�b�s���O���[�^�ł��������Ă݂悤���ƍl���Ă��܂��B
���A
Arduino���g���ăX�e�b�s���O���[�^�����L���������������ĉ������B
PIC���g���ăX�e�b�s���O���[�^�����L���������������ĉ������B
I2C�ڑ�16�`�����l��12�r�b�gPWM�T�[�{�V�[���h���g���ăT�[�{���[�^�����L������������
���ĉ������B(�Q�ȏ�̃T�[�{���[�^���g���Ȃ炱��𗘗p���������ǂ�����)�@*3)
�L���ꕔ�NjL(*4) 2020/04/20
�L���ꕔ�ύX(*3) 2018/02/13
MPLAB X�p�ɋL���ύX(*2) 2015/10/27
map����int��long�ɕύX(*1) 2014/01/15
�y���ޒ��H�[�K���[�W�n�E�X�z
Copyright (C) 2006-2020 Shigehiro Kimura All Rights Reserved.