XBee偲PWM/僒乕儃僔乕儖僪傪巊偭偰儔僕僐儞壔偟偰傒傑偡
乲儅僀僐儞偺僩僢僾偵栠傞乴
慜夞偺儁乕僕偱PWM/僒乕儃僔乕儖僪(PCA9685)偺婎杮偲憖嶌曽朄偺榖偼婰帠偵偟傑偟偨丅
枖丄僒乕儃儌乕僞偺婎杮摦嶌偲惂屼曽朄偺榖偼偙偪傜偱偡丅
崱夞儔僕僐儞壔偡傞偵偁偨傝XBee偵柍慄晹暘傪扴摉偝偣傑偟偨丄XBee偺婎杮偲憖嶌曽朄偺榖偼偙偪傜偵
彂偄偰偄傑偡偺偱婎杮偺榖偼懘乆偦偪傜傪嶲徠壓偝偄丅
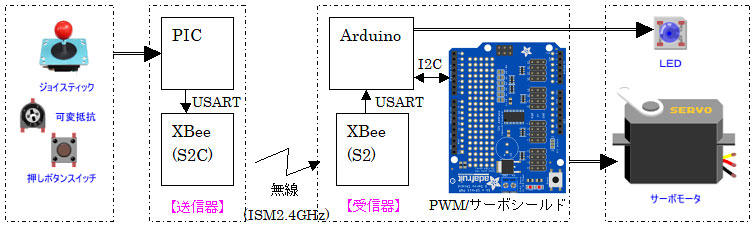
XBee傪巊偭偨憲庴怣偺奣擮恾
憲怣懁偺XBee偼"S2C"儌僕儏乕儖傪巊偄傑偟偨丄偙傟偼"S2"儌僕儏乕儖偺屻宲婍側偺偱偉丄
偳偺條側暔偐挷嵏偡傞堊偵侾屄峸擖偟偨暔偱偡丄傛偭偰庴怣懁偺XBee偼"S2"儌僕儏乕儖偲側傝傑偟偨丅
弌棃傞側傜憲庴怣嫟偵"S2C"傪巊偭偨曽偑椙偄偱偡丄徚旓揹椡傕彮側偄姶偠偱揹攇偺撏偔嫍棧傕挿偄偱偡丅
彯丄憲怣懁"S2C"傪僽乕僗僩偝偣傟偽1200m掱撏偔傜偟偄偑徚旓揹椡傕傾僢僾偟傑偡丅
憲怣懁XBee偼僨乕僞傪憲傞偩偗丄庴怣懁XBee偼庴庢傞偩偗偺扨弮側捠怣側偺偱"AT(摟夁)儌乕僪"偱峴偄傑偡丅
庴怣懁偼"PWM/僒乕儃僔乕儖僪"偟偐帩偭偰側偄偺偱偉巊偆偺偼"Arduino"偲側傝傑偡丅
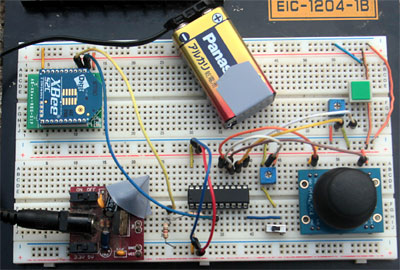 愭偢偼幚尡帪偺幨恀傪嵹偣傑偡丅
愭偢偼幚尡帪偺幨恀傪嵹偣傑偡丅
偙偪傜偼憲怣婍懁偺晽宨偱偡丅
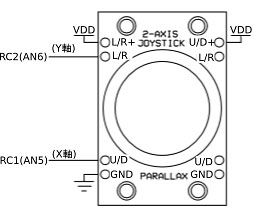
PIC偼丄16F1829傪巊偄傑偟偨丅
僕儑僀僗僥傿僢僋偺墶曽岦(X幉)偱僠儍儞僱儖0偺
僒乕儃儌乕僞偑摦偒丄廲曽岦(Y幉)偱僠儍儞僱儖1
偺僒乕儃儌乕僞偑摦偒傑偡丅
敿屌掕掞峈偼僒乕儃偺僯儏乕僩儔儖挷惍梡偱偡丅
墴偟儃僞儞SW偼庴怣婡懁偺LED偑揰摂偟傑偡丅
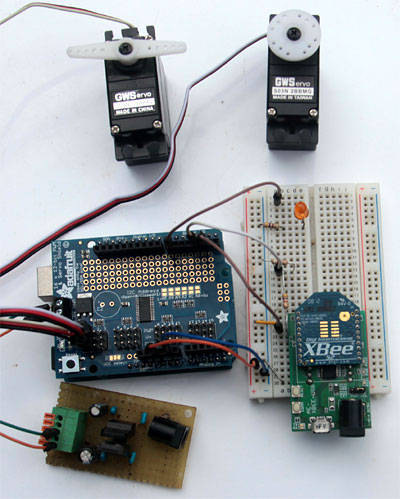 偱偉丄偙偪傜偑偀庴怣婍懁偺晽宨偱偡丅
偱偉丄偙偪傜偑偀庴怣婍懁偺晽宨偱偡丅
XBee偼"XBee USB僀儞僞乕僼僃乕僗儃乕僪"偵
嵹偣偰偄傑偡偑丄Arduino傪巊偆側傜XBee僔乕儖僪傪棙梡偟偨曽偑僗僢僉儕偡傞偱偟傚偆丅
"PWM/僒乕儃僔乕儖僪"偱側偔偙偪傜傪棙梡偟
PIC偱嶌傟偽傕偭偲偋僐儞僷僋僩偵側傞條側婥傕偟傑偡偑丏丏丏
僽乕僗僩偺愝掕偵偮偄偰
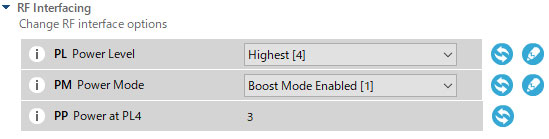
僐儞僼傿僊儏儗乕僔儑儞偺"PM"偱Enabled/Disabled偑曄峏偱偒傑偡偑丄
僨僼僅儖僩偼婛偵僽乕僗僩桳岠偲側偭偰偄傑偡偹丅
"PL"偼憲怣弌椡儗儀儖傪慖戰弌棃丄僨僼僅儖僩偼嵟戝弌椡偱偡偹丅
憲怣僨乕僞僼儗乕儉偵偮偄偰
XBee娫偺僨乕僞偼"AT(摟夁)儌乕僪"偱憲怣偟傑偡偑僨乕僞偺僼僅乕儅僢僩傪彂偄偰抲偒傑偡丅
僿僢僟 惂屼懳徾傪帵偡斣崋
伀 伀
[0xFF][僨乕僞屄悢][CH.No][2byte僨乕僞]-------[CH.No][2byte僨乕僞]
劅劅劅劅劍劅劅劅劅劅
1僨乕僞曈傝3byte(MAX6僨乕僞丄曄峏壜)
僒乕儃儌乕僞丗[CH.No]偼PWM/僔乕儖僪偺僠儍儞僱儖斣崋 0-15 傪巜掕
[2byte僨乕僞]偼PWM/僔乕儖僪偺PWM儗僕僗僞抣 0-4095 傪巜掕
俴俤俢丗[CH.No]偼 16 偱[2byte僨乕僞]偼1(ON)/0(OFF)傪巜掕
椺乯 [0xFF][3] [0][475] [1][135] [16][1]
慡晹偱11byte丄[僨乕僞屄悢]偼9byte偱側偔3屄偲偡傞
仸 PWM儗僕僗僞抣 0-4095偼幚嵺偼135-475偺抣傪憲偭偰偄傑偡丄偙傟偼崱夞巊偭偨僒乕儃儌乕僞偺
丂 摦嶌斖埻偱偁傝丄巊偆僒乕儃儌乕僞偵傛傝堎側傝傑偡丅
丂 奺僒乕儃儌乕僞偺摦嶌斖埻傪扵傞偺偼"PWM/僒乕儃僔乕儖僪傪摦偐偟偰傒傑偡(1/2)"傪尒傑偟傚偆丅
乻XBee偺愝掕乼
XBee偼"AT(摟夁)儌乕僪"偱峴偄傑偡偑丄"S2C"/"S2"儌僕儏乕儖嫟偵僨僼僅儖僩偼[儖乕僞偺AT儌乕僪]偱
摦嶌偡傞偺偱偦偺傑傑偱偡偑丄愝掕儢強偼"PAN ID"偲"DH/DL"偵憡庤偺傾僪儗僗傪愝掕偡傞偩偗偱偡丅
偦偺曽朄偼乭XBee(柍慄捠怣)偺幚尡僷乕僩2乭傪嶲徠壓偝偄丅
乻憲怣婍懁乼
 嵍恾偼僕儑僀僗僥傿僢僋僺儞偺峔惉恾偱偡丅
嵍恾偼僕儑僀僗僥傿僢僋僺儞偺峔惉恾偱偡丅
僕儑僀僗僥傿僢僋偼丄Parallax Inc.偺偙偪傜傪峸擖偟傑偟偨丅
崱夞偼丄僽儗僢僪儃乕僪偵僕儑僀僗僥傿僢僋傪憓偡娭學忋丄
墶偵攝抲(壓恾)偟偰偄傞帠偵拲堄偟傑偟傚偆丅
巊偆僕儑僀僗僥傿僢僋偺撉庢傝抣偵傛傝丄
僾儘僌儔儉(XBeeTransmitter.c)偺105/106峴栚傪挷惍偡傞昁梫偑
桳傞偱偟傚偆丅
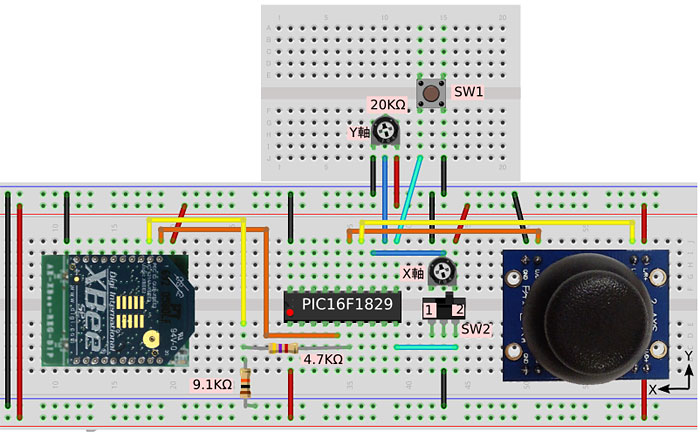
PIC16F1829傪巊偭偨憲怣婍懁幚懺攝慄恾
揹尮偼5.0V偱偡丄XBee偼3.3V偱偡偑XBee梡2.54mm僺僢僠曄姺婎斅偵
3.3V揹埑儗僊儏儗乕僞傪幚憰偟偰偄傞偺偱5.0V偲偟傑偡丅
XBee偺I/O傕3.3V側偺偱PIC偐傜偺TX(USART)怣崋偼5.0V偩偐傜暘埑偱3.29V偲偟偰偄傑偡丅
SW1/SW2偺僾儖傾僢僾掞峈偼PIC撪晹偺僾儖傾僢僾傪棙梡偟偰偄傑偡丅
彯丄XBee偐傜PIC傊憲怣偡傞USART怣崋(烌怓慄)偼崱夞巊偭偰偄側偄偺偱攝慄偟側偔偰傕OK偱偡丅
僟僂儞儘乕僪僾儘僌儔儉偵偮偄偰
伀偙偙偐傜僒儞僾儖僾儘僌儔儉僜乕僗僼傽僀儖傪僟僂儞儘乕僪偟偰壓偝偄丅
XBeeTransmitter.zip
僾儘僌儔儉僜乕僗傪僟僂儞儘乕僪偟偨傜丄MPLAB X偵偰僾儘僕僃僋僩傪嶌惉偟傑偡丅
埲壓偺僼傽僀儖傪僾儘僕僃僋僩僨傿儗僋僩儕偵僐僺乕偟偰僾儘僕僃僋僩偵庢崬傫偱壓偝偄丅
師偵僐儞僷僀儖偲俹俬俠彂偒崬傒傪幚峴偟偰壓偝偄丅
MPLAB(R) XC8 C Compiler Version 1.32僐儞僷僀儔傪巊梡偟偰偄傑偡丅
僟僂儞儘乕僪僼傽僀儖傪夝搥偡傞偲壓婰偺條側僼傽僀儖峔惉偱偡丅
丂XBeeTransmitter.cゥゥゥゥ 杮懱偺憲怣僒儞僾儖僾儘僌儔儉
丂skUARTlib.cゥゥゥゥゥゥゥ 倀俽俙俼俿捠怣傪峴偆娭悢僜乕僗僼傽僀儖
丂skUARTlib.hゥゥゥゥゥゥゥ 倀俽俙俼俿捠怣傪峴偆娭悢偺僿僢僟僼傽僀儖
丂彯丄俠俹倀偺僋儘僢僋偼16MHz傪憐掕偟偰偄傑偡丅
倃俛倕倕俿倰倎値倱倣倝倲倲倕倰丏們
捠忢偼僗儔僀僪僗僀僢僠(SW2)偼"1"懁偵偰憖嶌偟傑偡丅
奺僒乕儃偺拞墰(僯儏乕僩儔儖)埵抲傪憖嶌偡傞応崌偵丄SW2傪"2"懁偵偟偰敿屌掕掞峈偱挷惍偟傑偡丅
挷惍偑廔椆偟偨傜SW2傪"1"懁偵栠偟傑偡丅
僕儑僀僗僥傿僢僋傪憖嶌偡傟偽庴怣婍懁偺僒乕儃儌乕僞偑摦嶌偡傞偲巚偄傑偡丅
墴偟儃僞儞僗僀僢僠(SW1)傪墴偣偽庴怣婍懁偺LED偑揰摂偟丄曻偣偽LED偼徚摂偟傑偡丅
彯丄SW偵偰LED偺ON/OFF偱側偔丄LED傪PWM/僒乕儃僔乕儖僪偵攝慄偟敿屌掕掞峈曈傝偱峴偊偽LED偺
挷岝偑弌棃傞偱偟傚偆丅
揹尮傪擖傟傞慜偵敿屌掕掞峈偼拞墰曈傝偵夞偟偰抲偄偨曽偑椙偄偱偟傚偆丅
敿屌掕掞峈偱偼側偔彫宆偺僗儔僀僪儃儕儏乕儉傪巊偭偨曽偑憖嶌偟傗偡偄偲巚偄傑偡丅
傾儖僾僗揹婥偺偙偪傜偐偙偪傜曈傝偱偡丅
倱倠倀俙俼俿倢倝倐丏們
倱倠倀俙俼俿倢倝倐丏倛
偙偺撪梕偼乭FT232RL巊梡偵傛傝USB傪僔儕傾儖曄姺偟偰儅僀僐儞偲宷偓傑偡乭傪嶲徠壓偝偄丅
扐偟丄"skUARTlib.h"偼USART1懁傪棙梡偡傞條偵#define掕媊偟偰偄傑偡丅
枖丄倀俽俙俼俿偺庴怣僶僢僼傽僒僀僘偼32byte偲偟偰偄傑偡丅
彯丄XBee偲偺捠怣偼 9600bps Data=8bit Parity=none Stop=1bit Flow=none 偱峴偭偰偄傑偡丅
乻Arduino庴怣婍懁乼
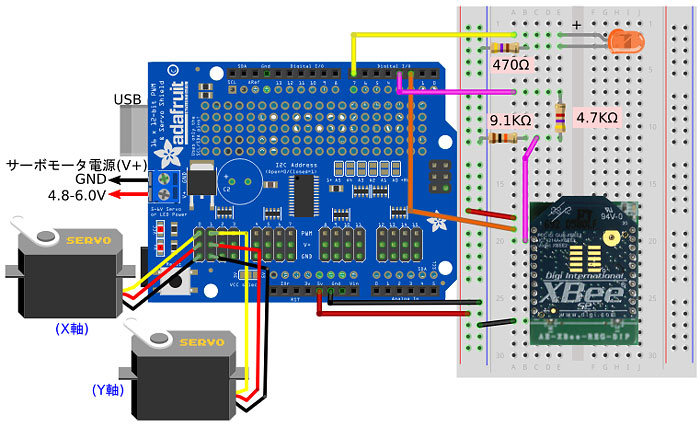
庴怣婍懁幚懺攝慄恾
揹尮偼5.0V偱偡丄僒乕儃儌乕僞梡偺揹尮5.0V偲Arduino偺惂屼梡奜晹揹尮偑昁梫偱偡丅
彯丄Arduino偐傜XBee傊憲怣偡傞USART怣崋(暘埑儔僀儞)偼崱夞巊偭偰偄側偄偺偱攝慄偟側偔偰傕OK丅
僒乕儃偺愙懕偱傎偲傫偳偺僒乕儃偵偼丄僒乕儃僪儔僀僶偺僿僢僟乕偵捈愙愙懕偡傞昗弨偺
俁僺儞儊僗僐僱僋僞偑晅懏偟偰偄傑偡丄昁偢僾儔僌傪傾乕僗慄(GND:捠忢偼崟傑偨偼拑怓)偵崌傢偣丄
掙晹偺峴偲怣崋慄(PWM:捠忢偼墿怓傑偨偼敀怓)傪忋偵偟偰壓偝偄丅
偙偪傜(S03N 2BBM/JR)偺僒乕儃偼"JR"僞僀僾偱偡偑偙偙偱巊偭偰偄傞偺偼"僼僞僶僞僀僾"偱偡丅
僒儞僾儖僾儘僌儔儉偵偮偄偰
愭偢偼伀偙偙偐傜PWM/僒乕儃(PCA9685)梡娭悢儔僀僽儔儕傪僟僂儞儘乕僪偟偰壓偝偄丅
skPWMServo.zip
巊偄曽傗僀儞僗僩乕儖曽朄摍偼丄PWM/僒乕儃僔乕儖僪(PCA9685)傪摦偐偟偰傒傑偡(2/2)傪尒傑偟傚偆丅
Arduino梡庴怣婍懁偺僒儞僾儖僗働僢僠僼傽僀儖偼伀偐傜僟僂儞儘乕僪偟偰壓偝偄丅
XBeeReceiver.zip
夝搥偝偣僨傿儗僋僩儕娵偛偲Arduino偺嶌嬈僼僅儖僟偺桳傞応強偵堏摦偝偣傑偡丅
嶌嬈僼僅儖僟偺妋擣偼丄IDE偺儊僯儏僶乕偐傜[僼傽僀儖]仺[娐嫬愝掕]傪憖嶌偟奐偐傟偨夋柺撪偺
"僗働僢僠僽僢僋偺曐懚応強"傪尒傑偟傚偆丅
倃俛倕倕俼倕們倕倝倴倕倰丏倝値倧
庴怣婍懁偺僒儞僾儖偱偡丄XBeeReceiver.ino傪奐偔偵偼丄
IDE傪婲摦偟偰丄儊僯儏乕僶乕偺t傽僀儖á僗働僢僠僽僢僋╗XBeeReceiver]
傪僋儕僢僋憖嶌偡傟偽僼傽僀儖偑奐偐傟傑偡丅
師偵丄IDE僣乕儖僶乕偺pload{僞儞傪僋儕僢僋偟偰僐儞僷僀儖偲arduino儃乕僪偵彂崬傒傪峴偄傑偡丅
XBee偲偺捠怣偼"SoftwareSerial"傪巊偄傑偟偨丅
乻 偦偺懠 乼
XBee傪巊偄丄彮側偄晹昳偱堄奜偲斾妑揑娙扨偵儔僕僐儞壔弌棃傑偟偨丅
XBee傪棙梡偡傞偲庴怣婍懁偐傜偺僨乕僞憲怣傕峴偊傞偺偱憖嶌懳徾婍婡偐傜偺僙儞僒乕摍偺
傾儞僒乕僶僢僋偑弌棃偨傝傕偟傑偡偹丅
傑偨丄XBee側偺偱庴怣婡傪悢戜傇傜壓偘傞帠傕壜擻偱偟傚偆丄懡暘丄偍偦傜偔丅
偦傟偲偋丄XBee偺揹攇偑偳偺埵撏偔偺偐偼幚尡偟偰偄傑偣傫丅丂m(_ _)m
亂偒傓拑岺朳僈儗乕僕僴僂僗亃
Copyright (C) 2006-2018 Shigehiro Kimura All Rights Reserved.