�o�v�l�^�T�[�{�V�[���h(PCA9685)�����Ă݂܂�(2/2)
�i�P�^�Q�j
�iXBee���W�R���j
�k�}�C�R���̃g�b�v�ɖ߂�l
�O�y�[�W(1/2)��PWM/�T�[�{�V�[���h�̓���m�F�͏I������Ǝv���܂��B
���̃y�[�W�ł́A�W���C�X�e�B�b�N�����t���ăT�[�{���[�^���������Ǝv���܂��B
���A�O�y�[�W�ł̓���m�F�́A"Adafruit-PWM-Servo-Driver-Library"�̃��C�u�������g���܂������A
���̃��C�u�����̓R�����g���p�ꂾ�����APIC�p�ɈڐA���鎖���l����Ƃ��A�����Ń��C�u������
�쐬���������ǂ������Ȃ̂ł�"skPWMServo"���C�u��������鎖�ɂ��܂����B
�W���C�X�e�B�b�N
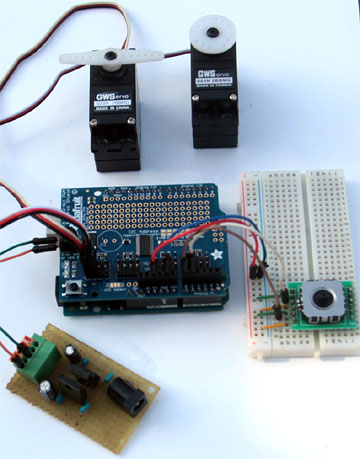
 ����̎����Ŏg�p�����W���C�X�e�B�b�N�́A�H���ʏ����������̕��ł��B
����̎����Ŏg�p�����W���C�X�e�B�b�N�́A�H���ʏ����������̕��ł��B
XY�����ꂼ���10K���̉ϒ�R����t���ėL�̂ŃA�i���O�l��\�������Č�����
0-1023(5.0V)�ł����B
�ł������A�c�}�~������Β����Ɏ������A(1024/2=512)���s���̂ł������A
�Ⴆ��X�����ɓ|���Ď�������"509"�ʂŁA�E�ɓ|���ĕ�����"606"�ʂƃY����B
�T�[�{�̐����ʒu(90��)���ς��ƌ������ɂȂ��Ă��܂��܂����B
���̃W���C�X�e�B�b�N�̐��\(�\��)�Ȃ̂ł��傤���H�A����Ƃ�������ȕ��Ȃ̂ł��傤���H�B
���W�R���̗l�ȕ������ꍇ�͑��̃W���C�X�e�B�b�N���ǂ������Ȋ������݂����Ȃ��B
�Ȃ̂ŁA����̓X�P�b�`�ŕ���˂��Ă��܂��B
�o�r�D�@*1)
������́h�Q���W���C�X�e�B�b�N�E���W���[���h���w�����l��\�������Č����B
4-1015�ʂ͈̔͂ŁA������502/504�ƃY��������L�̃W���C�X�e�B�b�N���܂��ł��ˁB
�s���Ԕz���}�t
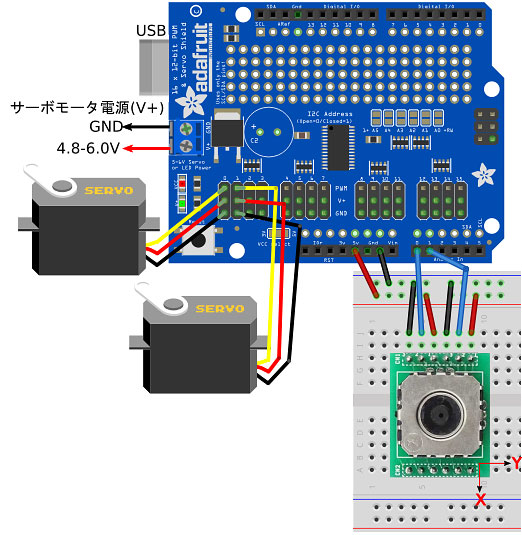
����p�d����USB�����5.0V�ŁA�T�[�{�p�d���͊O������5.0V�ł��B
�W���C�X�e�B�b�N��"
CN1"����z�����A"CN2"���͂ǂ��ɂ��q�����Ă��܂���B
�T�[�{�̐ڑ��łقƂ�ǂ̃T�[�{�ɂ́A�T�[�{�h���C�o�̃w�b�_�[�ɒ��ڐڑ�����W����
�R�s�����X�R�l�N�^���t�����Ă��܂��A�K���v���O���A�[�X��(GND:�ʏ�͍��܂��͒��F)�ɍ��킹�A
�ꕔ�̍s�ƐM����(PWM:�ʏ�͉��F�܂��͔��F)����ɂ��ĉ������B
�`�����l���O�̃T�[�{��X���ŁA�`�����l���P�̃T�[�{��Y�������ł��B
�s�T���v���v���O�����ɂ��āt
����������Arduino�p�T���v���X�P�b�`�t�@�C�����_�E�����[�h���ĉ������B
�����o�v�l�r���������Dzip
�𓀂���Ɖ��̗l�ɓW�J����܂��B
[skPWMServo]������[examples]��������������[ServoTest]------ ServoTest.ino
���@skPWMServo.cpp ����[PWMservoOne]---- PWMservoOne.ino
���@skPWMServo.h ����[PWMservoTwo]---- PWMservoTwo.ino
���@keywords.txt
ArduinoIDE 1.8.1 ���C���X�g�[������Ă���t�H���_�[�A�C���X�g�[�����ύX���Ă��Ȃ��Ȃ�
[C�F\Program Files\arduino-1.8.1\libraries]�ł��B
���̏ꏊ�ɏ�L�𓀃t�@�C����[skPWMServo]�f�B���N�g���ۂ��ƈړ����܂��B
�܂��A���C�u�����̓o�^�◘�p���@�Ȃǂ̘b�����������Q�l�ɂ��ĉ������B
ServoTest.ino�@ �E�E�E�E�E�E�E�{�̂̃T���v���X�P�b�`(�T�[�{�̓���m�F�p)
PWMservoOne.ino�@ �E�E�E�E�E�{�̂̃T���v���X�P�b�`(�W���C�X�e�B�b�N�ƃT�[�{�P��)
PWMservoTwo.ino�@ �E�E�E�E�E�{�̂̃T���v���X�P�b�`(�W���C�X�e�B�b�N�ƃT�[�{�Q��)
skPWMServo.cpp�@�E�E�E�E�E�EPWM/�T�[�{(PCA9685)�p�����C�u�����̃\�[�X�t�@�C��
skPWMServo.h�@�E�E�E�E�E�E�EPWM/�T�[�{(PCA9685)�p���̃w�b�_�t�@�C��
keywords.txt�@�E�E�E�E�E�E�E�E�L�[���[�h�t�@�C��
�r���������s�������D������
�T�[�{�̓���m�F�p�T���v���ł��AServoTest.ino���J���ɂ́A
IDE���N�����āA���j���[�o�[�̢�t�@�C�������X�P�b�`�̗ᣁ��skPWMServo���[ServoTest]
���N���b�N���삷��t�@�C�����J����܂��B
���ɁAIDE�c�[���o�[�̢Upload��{�^�����N���b�N���ăR���p�C����arduino�{�[�h�ɏ����݂��s���܂��B
�N��������ƁA�T�[�{���[�^(�`�����l���O)����90��(�����ʒu)�t�߂ɉ�]����Ǝv���܂��B
���̃T���v���́A�T�[�{��]�͈͂̍ŏ�/�ő�l�����ɂ߂�ׂɎg�p����Ηǂ��ł��傤�B
�e�T�[�{�ɂ���āA����M���̏o�̓f���e�B���ON�p���X������(us)�����X�قȂ�܂��B
�Ȃ̂ł��A���̃T���v���ɂăV���A�����j�^��\�������Ēl�������Â���Ē��ׂ܂��傤�B
�T�[�{�̉��͈͈ȏ�̒l��^����Ɖ��鋰�ꂪ�L��܂��A�ŏ�/�ő�l�̌��ɂ߂͒��ӂ��܂��傤�B
���A����g�����T�[�{��]�͈͂́A�ŏ�660us(�E��] 180��)�A�ő�2320(����] 0��)�ł����B
�o�v�l�����������n�����D������
�W���C�X�e�B�b�N�ƃT�[�{�P�ł̃T���v���ł��APWMservoOne.ino���J���ɂ́A
IDE���N�����āA���j���[�o�[�̢�t�@�C�������X�P�b�`�̗ᣁ��skPWMServo���[PWMservoOne]
���N���b�N���삷��t�@�C�����J����܂��B
�@ ServoTest.ino�Œ��ׂ��ŏ�/�ő�l(PWM�o�͂̕����𑜓x(0-4095:135-475)�����������܂��B
�A IDE�c�[���o�[�̢Upload��{�^�����N���b�N���ăR���p�C����arduino�{�[�h�ɏ����݂��s���܂��B
�B �N�������A�W���C�X�e�B�b�N�̂x��������"UP"������T�[�{���[�^(�`�����l���O)���E��]���A
�@ "DOWN"���������]����Ǝv���܂��B
�� ���̃T���v���́ASetDutyRatio( )�����g��PWM�o�͂̕����𑜓x�ʼn�]�w����^�������̂ł��B
�o�v�l�����������s�����D������
�W���C�X�e�B�b�N�ƃT�[�{�Q�ł̃T���v���ł��APWMservoTwo.ino���J���ɂ́A
IDE���N�����āA���j���[�o�[�̢�t�@�C�������X�P�b�`�̗ᣁ��skPWMServo���[PWMservoTwo]
���N���b�N���삷��t�@�C�����J����܂��B
�@ "skPWMServo.h"�ɋL�q��#define "SERVOMIN_US"/"SERVOMAX_US"�ɁA
�@�@ServoTest.ino�Œ��ׂ��ŏ�/�ő�l(�o�̓f���e�B���ON�p���X������)�ŏ��������܂��B
�A IDE�c�[���o�[�̢Upload��{�^�����N���b�N���ăR���p�C����arduino�{�[�h�ɏ����݂��s���܂��B
�B �N�������A�W���C�X�e�B�b�N�̂x��������PWMservoOne.ino�Ɠ����ł��A
�@ �A���A��]�w����SetServoOnTime( )�����g���o�̓f���e�B���ON��ٽ������(us)�ŗ^���Ă��܂�
�@ �w�������̉�]�w����SetServoAngle( )�����g����]�p�x(0-180��)�ŗ^���Ă��܂��A
�@ �Ȃ̂�"LEFT"������T�[�{���[�^(�`�����l���P)������]���A"RIGHT"������ΉE��]����ł��傤
�� ���̃T���v���́A�o�̓f���e�B���ON�p���X�����ԁE��]�p�x�ʼn�]�w����^�������̂ł��B
�� SetServoOnTime( )/SetServoAngle( )�����g����map( )���̋L�q�������ăv���O�����ʂ������A
�@ ���̕����x���|����ł��傤�B
�@ SetDutyRatio( )�����g���A���ڂ�PWM�o�͂̕����𑜓x�l�Ŏw������Ό������ǂ��Ǝv���邪��
�s���C�u�����̐����t
�����o�v�l�r���������D��
SetServoOnTime( )/SetServoAngle( )�����g���ꍇ�͕K���g�p����T�[�{�̉�]�͈͂�ݒ肵�܂��B
#define SERVOMIN_US 660 // �p���X�̍ŏ�������us
#define SERVOMAX_US 2320 // �p���X�̍ő啝����us
�����o�v�l�r���������D������
PWM/�T�[�{(PCA9685)�̐�����s���ׂ̊��W�ł��B
�܂����p����ꍇ�͉��L�Q�s���X�P�b�`�̍ŏ��ɋL�q���܂��B
#include <Wire.h>
#include <skPWMServo.h>
���̎g������������܂��B
PWM/�T�[�{(PCA9685)�̊����C�u�������g�p����ׂɕK�v�Ȑ錾���s���܂��B
skPWMServo Servo(0x40) ; // PWM/�T�[�{�̃I�u�W�F�N�g�쐬(PCA9685��I2C�A�h���X)
Servo�̖��O�͕ύX�o���܂����A�ȉ��̗��"Servo"�ł̐����ł��B
ans=Servo.Init( )
�@�f�o�C�X�̏��������s�������B
�@int ans�F�߂�l�A0=����I���@����ȊOI2C�ʐM�G���[���L
�@ 1 = ���낤�Ƃ����f�[�^�����M�o�b�t�@�̃T�C�Y����
�@ 2 = �X���[�u�E�A�h���X�𑗐M���ANACK����M����
�@ 3 = �f�[�^�E�o�C�g�𑗐M���ANACK����M����
�@ 4 = ���̑��̃G���[
�@ 5 = �f�[�^��M�G���[
�@�� ��������MODE1���W�X�^�̂ݍs���Ă��܂��AMODE2���W�X�^��ύX����ꍇ�͌䎩���Œlj�
�@�@ ���܂��傤�B
ans=Servo.SetFrequency(val)
�@PWM�̏o�͎��g���ݒ���s�������B
�@float val�F�o�͂�����g���l���w�肵�܂�(24Hz�`1526Hz)
�@int ans�F�߂�l�A0=����I���@����ȊO Init() ��ans�l���Q��
�@�� 50Hz�Ǝw�肵�Ă����ۂ́A �v�������50.11Hz���o�Ă��܂��B
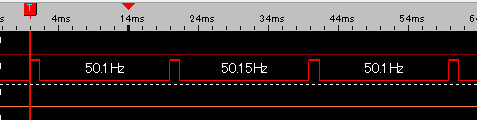

����Ȋ����ł��B
SetFrequency(val)������
val *= 0.95 ;
�Œ������Ă��܂��B
ans=Servo.SetDutyRatio(channel,on_val,off_val)
�@PWM�̏o�̓f���e�B��ݒ���s�������B
�@�f���e�B��(0-4095)�����W�X�^�ɐݒ肳�ꂽ��AI2C��STOP�M���Ŏ��ۂ�PWM�o�͂��J�n����܂��B
�@int channel�FPWM�o�͂���`�����l��(0�`15)���w�肵�܂�
�@ 0 4095
�@ �Q�Q�b�P�P�P�b�Q�Q�Q�b�Q
�@unsigned int on_val�F ---->| �o�͔g�`�̗��グ�J�n�^�C�~���O(0-4095)���w�肵�܂�
�@unsigned int off_val�F ------------>| �o�͔g�`�̗������J�n�^�C�~���O(0-4095)���w�肵�܂�
�@int ans�F�߂�l�A0=����I���@����ȊO Init() ��ans�l���Q��
�@�� ����̓T�[�{���[�^�̐�����s���̂ŁA�o�͔g�`��"on_val=0"�łO���痧���グ�܂��B
Servo.SetServoAngle(channel,angle)
�@�T�[�{�̉�]���p�x�Ŏw�肷�鏈���B
�@int channel�FPWM�o�͂���`�����l��(0�`15)���w�肵�܂�
�@unsigned int angle�F�p�x(0-180��)���w�肵�܂�(90���Ő����ʒu)
�@�� SetFrequency(50)�Ǝ��g����ݒ肵�Ă��鎖�B
�@�� "skPWMServo.h"�ɂ�SERVOMIN_US/SERVOMAX_US��ݒ肷�鎖�B
Servo.SetServoOnTime(channel,t_us)
�@�T�[�{�̉�]���o�̓f���e�B���ON�p���X���Ŏw�肷�鏈���B
�@int channel�FPWM�o�͂���`�����l��(0�`15)���w�肵�܂�
�@unsigned int t_ua�FON�p���X���̎���(us)���w�肵�܂�
�@�� SetFrequency(50)�Ǝ��g����ݒ肵�Ă��鎖�B
�@�� "skPWMServo.h"�ɂ�SERVOMIN_US/SERVOMAX_US��ݒ肷�鎖�B
ans=Servo.Send(reg_adrs,*data,kosu)
�@�f�o�C�X�Ɏw����̃f�[�^�𑗐M���鏈���B
�@char reg_adrs�F���o���f�[�^�̃��W�X�^�A�h���X���w�肵�܂�
�@�@�@�@�@�@�@�@�@�@�@�@�@�A���I�ɏ��o���ꍇ�́A���o�����W�X�^�̐擪�A�h���X���w�肵�܂��B
�@unsigned char *data�F���o���f�[�^�̊i�[����w�肵�܂�
�@char kosu�F���o���f�[�^�̃o�C�g�����w�肵�܂�
�@int ans�F�߂�l�A0=����I���@����ȊO Init() ��ans�l���Q��
ans=Servo.Receive(reg_adrs,*data,kosu)
�@�f�o�C�X����w����̃f�[�^����M���鏈���B
�@char reg_adrs�F�Ǐo���f�[�^�̃��W�X�^�A�h���X���w�肵�܂�
�@�@�@�@�@�@�@�@�@�@�@�@�@�A���I�ɓǏo���ꍇ�́A�Ǐo�����W�X�^�̐擪�A�h���X���w�肵�܂��B
�@unsigned char *data�F�Ǐo�����f�[�^�̊i�[����w�肵�܂�
�@char kosu�F�Ǐo���f�[�^�̃o�C�g�����w�肵�܂�
�@int ans�F�߂�l�A0=����I���@����ȊO Init() ��ans�l���Q��
�s ���̑� �t
 �T���܂�������6P�̃s���\�P�b�g��2�o�ė����̂ł��A
�T���܂�������6P�̃s���\�P�b�g��2�o�ė����̂ł��A
�d�������ƃA�i���O�s���̏��ɔ��c�t�������B
�f�W�^�������͉����̕��i�������ł����悤�B
�Ƃ肠�����̓W���C�X�e�B�b�N���t����ꂽ�B
��́AXBee���̖����@����g���ă��W�R����������
�s�����������D�D�D�D
XBee���������V�^�ɂȂ��Ă��邼���A���܂�Ȃ�
���A�}�CHP�̌��������K�v�ɂȂ��Ă��܂��܂����B
�V�[���h����PCA9685�A�V�����W���C�X�e�B�b�N�A
�V�^XBee�D�D�D�D���������D�D�D�D
�ǂ����܂��傧�D�D�D�@�(�L�ցM;
�o�r�D
�h���W�R���������h���������ŋL���ɂ��Ă��܂��B
�L���ꕔ�NjL(*1) 2018/02/04
�y���ޒ��H�[�K���[�W�n�E�X�z
Copyright (C) 2006-2018 Shigehiro Kimura All Rights Reserved.