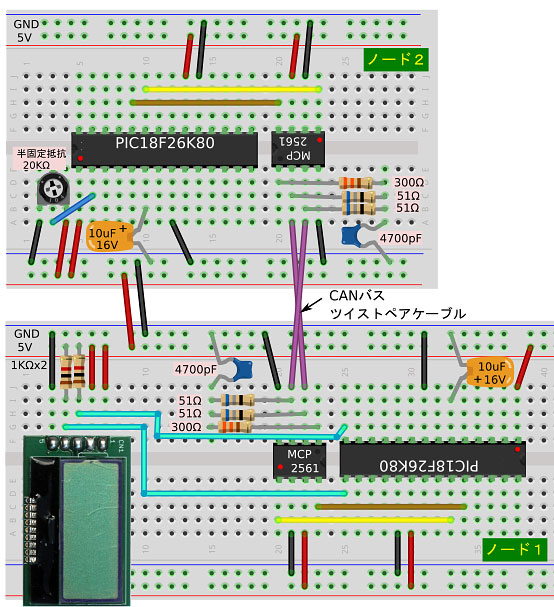
電源は5.0Vを使います。
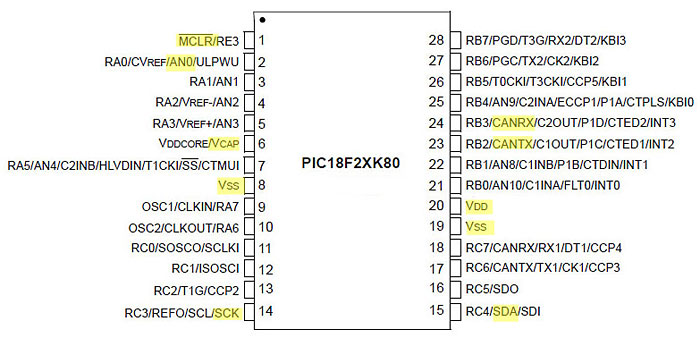
ICの方向に注意しましょう。
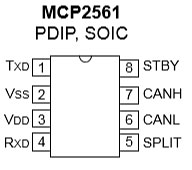 MCP2561/2の詳しい内容は日本語データシートを見ましょう。
MCP2561/2の詳しい内容は日本語データシートを見ましょう。[PICtoPIC]─┬─[mcc_generated_files]③MPLAB Xにてプロジェクトを作成し、 解凍ファイルをプロジェクトディレクトリにコピーして
├ node1.c ├─ interrupt_manager.c
├ node2.c ├─ interrupt_manager.h
├ node1Rc ├─ ecan.c
├ node2R.c └─ ecan.h
├ skI2CLCDlib.c
├ skI2CLCDlib.h
├ skI2Clib.c
└skI2Clib.h
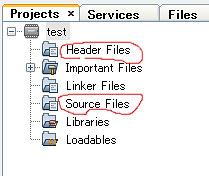 「Header Files」をマウスの右ボタンでク
リックし、サブメニューから
「Header Files」をマウスの右ボタンでク
リックし、サブメニューから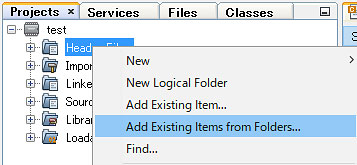
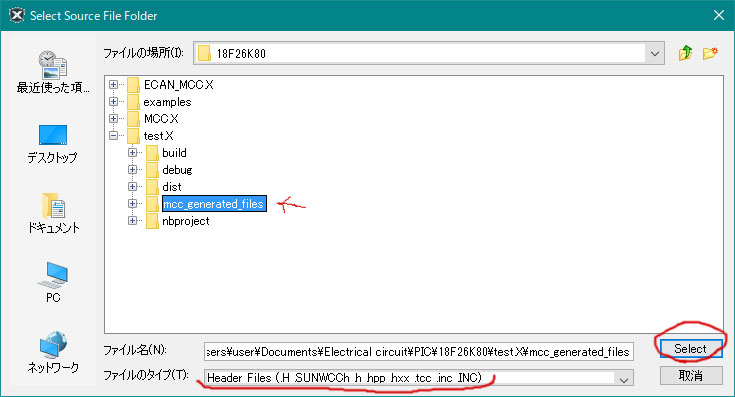
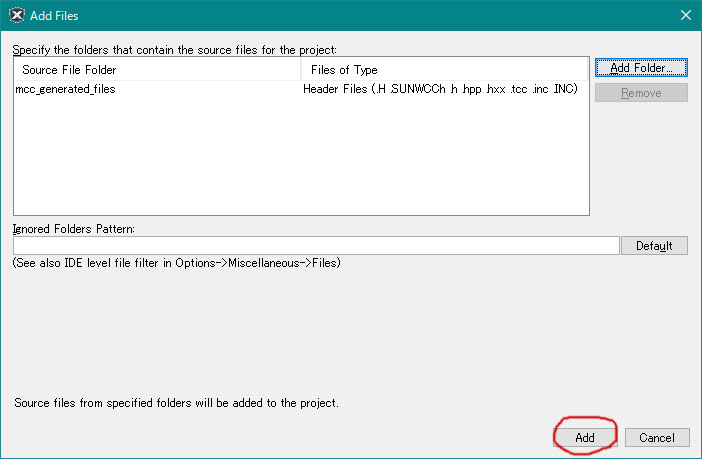
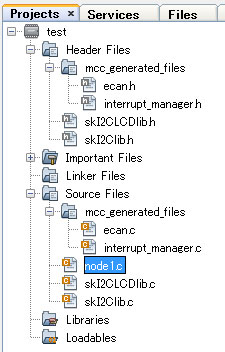 この様にファイ
ルを取り込みましょう。
この様にファイ
ルを取り込みましょう。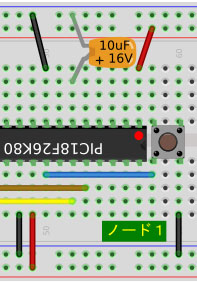 左図の如く、ノード1にスイッチを追加配線します。
左図の如く、ノード1にスイッチを追加配線します。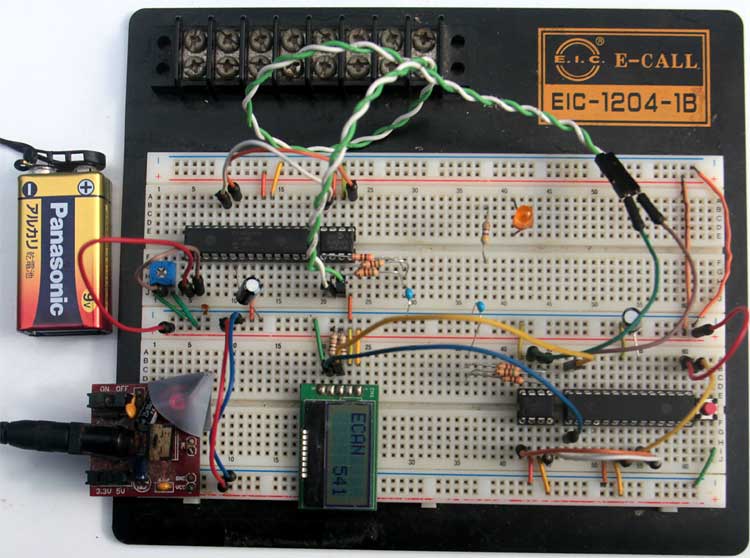
【きむ茶工房ガ
レージハウス】
Copyright (C) 2006-2018 Shigehiro Kimura All Rights Reserved.