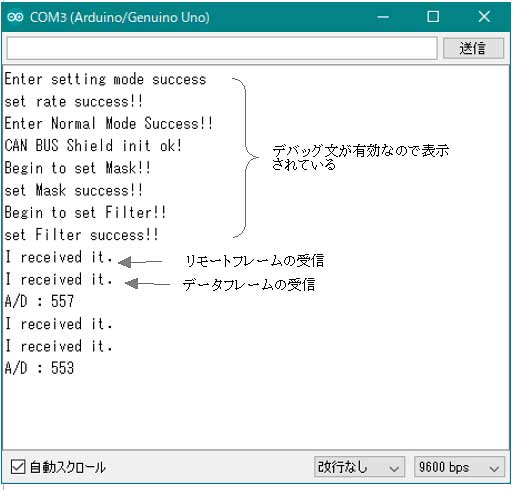
ノード1接続のLCDにも温度値を表示しています。
半固定抵抗値(ID:0x123)の表示はLCDに行っていません。
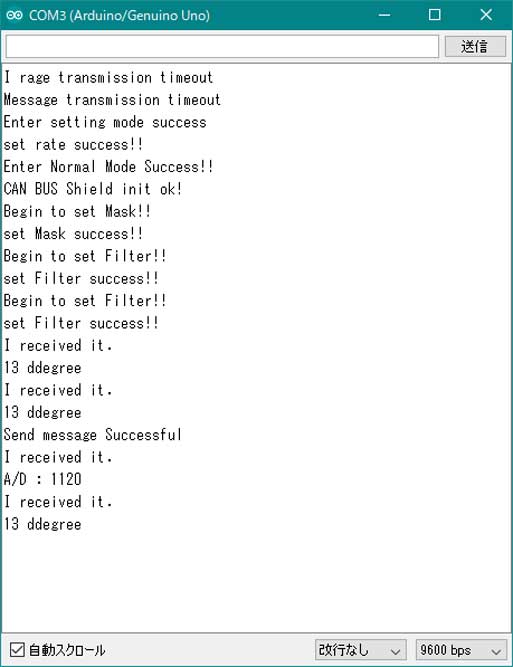
"リモートフレーム"が正常に送信されれば”Send message Successful”と表示されます。
尚、PIC側の電源が入っていない時に"リモートフレーム"を発行した場合は、
”Message transmission timeout”が表示されます。
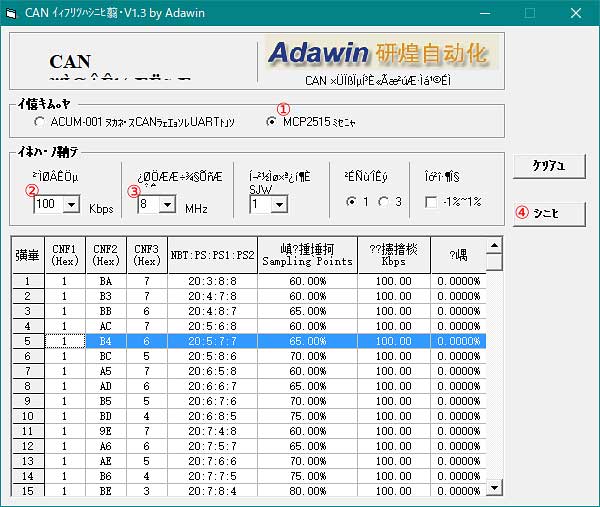
① "MCP2515"にチェックをいれます。
② CANバス通信速度を入力します。
③ クロック(8/16/20MHz)を選択します。
④ 計算ボタンをクリックします。
5行目でのビットタイミングは、NBT(Nominal Bit Time)=
20TQ
[Sync Seg:
1TQ] [PS(Propagation Seg):
5TQ] [PS1(Phase Seg1):
7TQ] [PS2(Phase Seg2):
7TQ]
サンプルポイントはPS1とPS2の間で65.0%になります。
(尚、Sync Segは1TQ固定なので上の一覧には表示されていない)
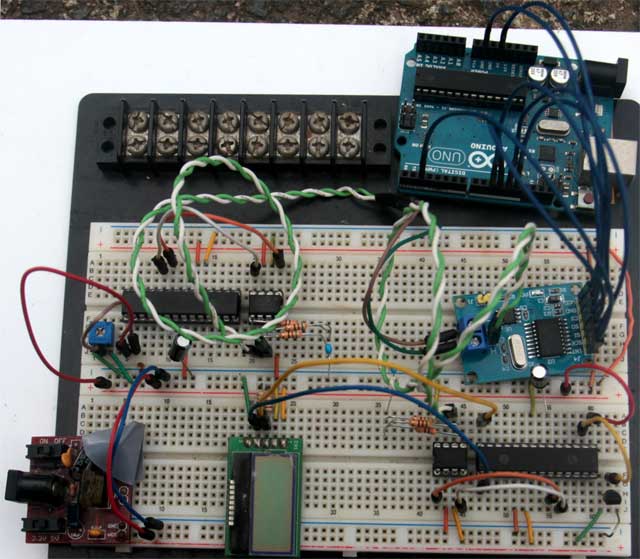
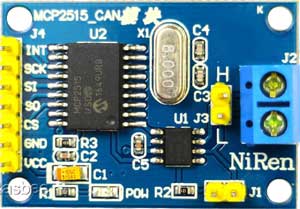 これがMCP2515モジュールで、
これがMCP2515モジュールで、
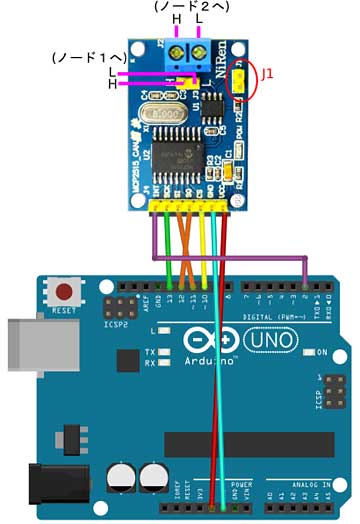 左図がArduinoUNOとのノード3配線図です。
左図がArduinoUNOとのノード3配線図です。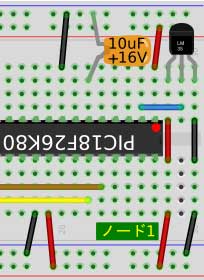 ② ノード1の回路からスイッチを取外し、温度センサーを取付けます。
② ノード1の回路からスイッチを取外し、温度センサーを取付けます。