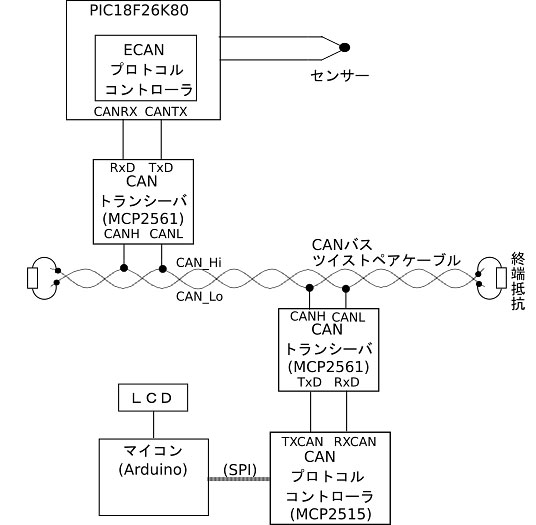
高速CAN(最大1Mbit/s)はリニアバスの両端で120 Ωの抵抗を使用するが、
低速CAN(最大125kbit/s)は各ノードで抵抗(100Ω以上)を使用します。
CANバス上に接続されたデバイスを”ノード”と呼びこの図では2個のノードが有ります。

| フィー
ルド名 |
ビッ
ト長 |
内
容 |
| SOF |
1 |
SOF(Strat
of Frame)フ
レーム送信の開始を示し、ドミナントで始まる。 ※ ノード間での同期(ハード同期)にも利用されます。 |
| ARBITRATION |
12 |
アー
ビトレーションフィールド ID(優先度や送信側の識別)、標準 フォーマットなら11ビット長です (拡張フォーマットなら11+18=29ビット長) 1 ビット長のフレームタイプを識別するRTR(Remote Transmission Request)。 (データフレームはド ミナント、リモートフレームならリセッシブ) ※ 優先順位を決める通信調停にも利用されます。 ※ 上位7ビットが全てリセッシブ(1)になる事は禁止されています。 |
| CONTROL |
6 |
コ
ントロールフィールド 1ビット長の"IDE(Identifier Extension)"と予約ビット"RB0"、 4ビット長の"データレングスコード(DLC)" から構成されます。 |
| DATA |
0-64 |
送信デー
タ部分で、0〜8バイトの可変長フィールドです。 |
| CRC |
16 |
CRC(Cyclic
Redundancy Check)巡
回冗長検査
フィールド 15ビット長のCRCシーケンスと1ビット長のCRCデリミタで構成されます。 |
| ACK |
1 |
ACKスロット:送信したCRCフィールドまでのデータが正
常に受信出来たかの判断に使用されます。 送信ノード側はリセッシブで送り、受信する全てのノード側が正常に受信したら、ドミナントで上書きされます。 |
| 1 |
ACKデリミタ:ACKスロットの終了を表します。 1ビット長のリセッシブ固定です。 |
|
| EOF |
7 |
EOF(End of Frame)フレームの終了を 示し、全てリセッシブ固定です。 |
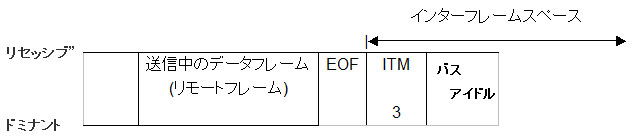
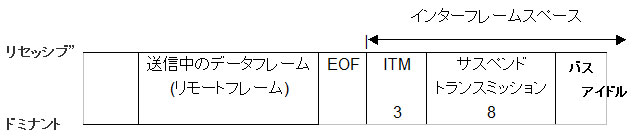
| Interframe Space |
3 |
ITM(Intermission)で3
ビット長のリセッシブ固定です。 通常のメッセージフレームは"SOF"〜"EOF"までで、このITM後が バスアイドル状態となり次のメッセージフレームが送信可能になります。 |

| フィールド名 | ビット長 | 内容 |
| SOF |
1 |
データフレームの開始、ドミナント(0)で固定。 |
| ID |
11 |
データ内
容や送信ノードの識別子、
メッセージ優先度も表す。 MSB LSB [10][9][8][7][6][5][4][3][2][1][0] 上位7 ビットがすべて'1'であるID設定は禁止されています。 |
| RTR |
1 |
データフレームなのでドミナント(0)をセット。 |
| IDE |
1 |
標準フォーマットなのでドミナント(0)をセット。 |
| RB0 |
1 |
予約ビッ ト、ドミナント(0)で固定。 |
| DLC |
4 |
データの
バイト数(0-8バイト) |
| DATA |
0-64 |
送信する
データ(DLCフィールドにてバイト単位で指定された長さ) |
| CRC
シーケンス |
15 |
"SOF"
から"DATA"までの演算で行う |
| CRCデ
リミタ |
1 |
CRC シーケンスの終了を表す区切り記号、リセッシブ(1)固定。 |
| ACKス
ロット |
7 |
送信側は 全てリセッシブ(1)でセット。 |
| ACKデ リミタ | 1 |
ACKス ロットの終了を表す区切り記号、リセッシブ(1)固定。 |
| EOF |
7 |
データフレームの終了、全てリセッシブ(1)でセット。 |


| フィールド名 | ビット長 | 内容 |
| SOF |
1 |
データフレームの開始、ドミナント(0)で固定。 |
| ID |
11 |
データ内
容や送信ノードの識別子、
メッセージ優先度も表す。 |
| RTR |
1 |
リモートフレームなのでリセッシブ(1)をセット。 |
| IDE |
1 |
標準フォーマットなのでドミナント(0)をセット。 |
| RB0 |
1 |
予約ビッ ト、ドミナント(0)で固定。 |
| DLC |
4 |
データの
バイト数だが、データは無いので0をセット。 |
| CRC
シーケンス |
15 |
"SOF"
から"DLC"までの演算で行う |
| CRCデ
リミタ |
1 |
CRC シーケンスの終了を表す区切り記号、リセッシブ(1)固定。 |
| ACKス
ロット |
7 |
送信側は 全てリセッシブ(1)でセット。 |
| ACKデ リミタ | 1 |
ACKス ロットの終了を表す区切り記号、リセッシブ(1)固定。 |
| EOF |
7 |
データフレームの終了、全てリセッシブ(1)でセット。 |

| フィー ルド名 | ビッ
ト長 |
内
容 |
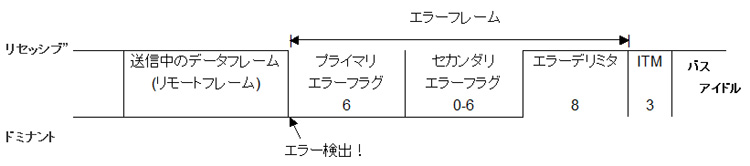
| エラーフラグ (プライマリ) |
6 |
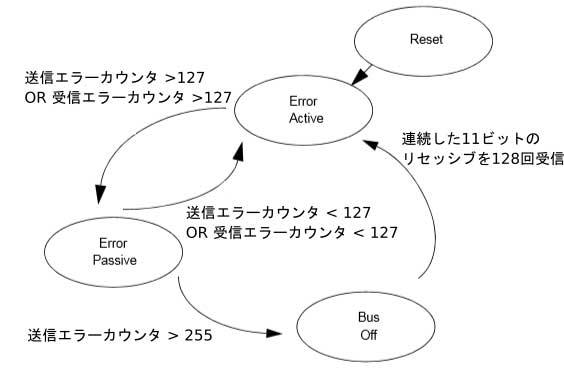
6ビット長ドミナント(0)を送る(エラーアクティブ状態時) 送受信のエラーカウンタが"127"を超えたらエラーパッシブ状態に 移行するこの場合は、6ビット長リセッシブ(1)が送られます。 |
| エラーフラグ (セカンダリ) |
0-6 |
6ビット長ドミナント(0)を送る 違反検出のタイミングによってはプライマリエラーフラグと被るのでビット長は変化する。 |
| エラーデリミタ |
8 |
8ビット長リセッシブ(1)を送る |
【きむ茶工房ガ
レージハウス】
Copyright (C) 2006-2018 Shigehiro Kimura All Rights Reserved.