プログラムソースをダウンロードしたら、MPLAB Xにてプロジェクトを作成します。
以下のファイルをプロジェクトディレクトリにコピーしてプロジェクトに取込んで下さい。
次にコンパイルとPIC書き込みを実行して下さい。 MPLAB(R) XC8 C Compiler Version 1.40コンパイラを使用しています。
ans = StepperFrequencySet(frq)
モータへの出力周波数(速度)を設定する処理
周波数が高くなると速度は速くなりますが、早すぎると脱調して回りません。
long frq : 設定する周波数(Hz)を指定(16Hz-10KHz)
int ans : -1 = 設定不可能な周波数ですよ 0 = 設定は成功した
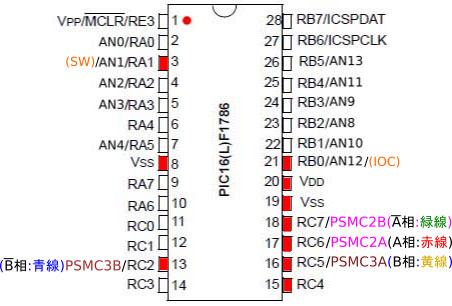 左図が、使用するPICピンの構成図です。
左図が、使用するPICピンの構成図です。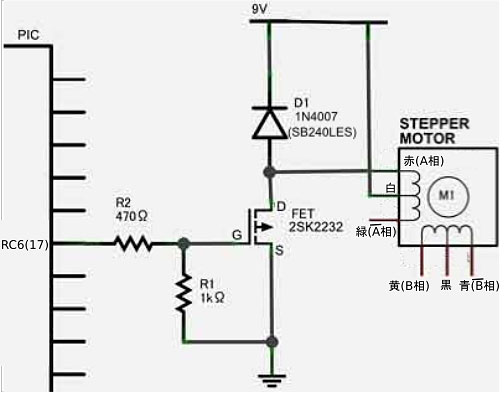 これが1回路分です、
これが1回路分です、