壛懍搙僙儞僒乕偲僕儍僀儘僙儞僒乕偱
僇儖儅儞僼傿儖僞乕偺幚尡(1/2)
乲俀乛俀乴
乲儅僀僐儞偺僩僢僾偵栠傞乴
僇儖儅儞僼傿儖僞乕(Kalman Filter)偵偮偄偰偼師儁乕僕(2/2)偱婰弎偟傑偡丅
崱夞偺僙儞僒乕偼丄俁幉壛懍搙僙儞僒乕ADXL345偲俁幉僕儍僀儘僙儞僒乕L3GD20傪巊偄傑偡丅
椉曽偲傕I2C偐SPI偱愙懕偟傑偡偑丄崱夞偼I2C偱峴偄傑偡丅
俁幉壛懍搙僙儞僒乕ADXL345偺帠偼丄乭俁幉壛懍搙僙儞僒偱孹幬妏搙傪應掕偟偰傒傑偡乭傪嶲徠
偟偰壓偝偄丅
偙偺儁乕僕偱傑偢偼丄俁幉僕儍僀儘僙儞僒乕L3GD20偐傜僨乕僞傪撉傒弌偟偰尒傑偡丅
PS.丂*1)
2020/03尰嵼"3幉僕儍僀儘僙儞僒乕L3GD20"儌僕儏乕儖偼廐寧捠彜偱偼斕攧偝傟偰偄傑偣傫丄
僗僩儘儀儕乕丒儕僫僢僋僗偺偙偪傜偺儌僕儏乕儖傪偮偐偄傑偟傚偆丅
乻俁幉僕儍僀儘僙儞僒乕乼
壓偺恾偼丄僕儍僀儘僙儞僒乕(嵍)偲壛懍搙僙儞僒乕(塃)偺奺幉偵偍偗傞摦嶌曽岦偺奣擮恾偱偡丅
僕儍僀儘僙儞僒乕偼丄奺幉偺夞揮曽岦偺壛懍搙偑摼傜傟傑偡丄側偺偱僙儞僒乕偑掆巭偟偰偄傞帪偲
掕懍搙偺応崌偺僙儞僒乕抣偼侽dps偲側傝丄摦嶌偟偰偄傞帪偺傒妏懍搙(妏壛懍搙)偑摼傜傟傑偡丅
側偺偱偉丄壗曽偐偺曽岦偵偳偺埵偺懍偝(壛懍)偱孹偒拞(夞揮拞)偲尵偆帠偑夝傝傑偡丅
壛懍搙僙儞僒乕偺奺幉偼丄廳椡曽岦偺孹幬妏搙偑摼傜傟傑偡丄
側偺偱偉丄悈暯忬懺偱偁傟偽倃倄幉偼侽搙偱丄倅幉偼廳椡曽岦偵90搙(1G)偺抣偑摼傜傟傞偼偢偱偡丅
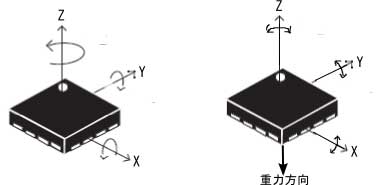
丂僕儍僀儘僙儞僒乕丂丂丂丂丂丂丂丂丂丂壛懍搙僙儞僒乕丂
L3GD20偺偙偲
應掕斖埻丂丗丂亇250dps丂丂亇500dps丂丂亇2000dps丂丂丂(崱夞偼亇250dps/0.00875dps)
暘夝擻丂丂 丗 丂0.00875dps丂0.0175dps 丂0.07dps
僨乕僞峏怴偺儗乕僩丂丗丂95Hz丂190Hz丂380Hz丂760Hz丂丂(崱夞偼760Hz)
揹尮揹埑丂丂丂丂丂丂丂 丗丂2.4V乣3.6V
僀儞僞乕僼僃僀僗丂丂丂 丗丂I2C/SPI丂(崱夞偼I2C)
丒壏搙僙儞僒乕(8價僢僩乛-40亷乣85亷)傕晅偄偰偄傑偡丅(崱夞枹幚尡)
丒奺幉偺弌椡偼16價僢僩偱偡丅
丒32僗儘僢僩偺FIFO婡擻桳傝丅(崱夞枹幚尡)
儗僕僗僞偺峔惉摍偺愢柧偼徣偒傑偡丄
僨乕僞僔乕僩摍偼僗僩儘儀儕乕丒儕僫僢僋僗偺儌僕儏乕儖斕攧儁乕僕傪尒傑偟傚偆丅丂*1)
PIC偐傜USART偱憲傜傟偰偒偨僨乕僞傪壓恾偺條偵攇宍傪昞帵偝偣傞僷僜僐儞偺僜僼僩偱偡丅
偙偺僜僼僩偼僔儕傾儖捠怣傪捠偠偰僨乕僞傪憲傟偽僌儔僼傪昤偒傑偡丅
側偺偱丄儅僀僐儞偺俙俢俠偱僨乕僞傪撉傫偱僔儕傾儖偱憲傟偽攇宍傪昞帵弌棃傞偲尵偆暔偱丄
俁僠儍儞僱儖傑偱懳墳偟偰偄傑偡丅
偙偪傜偺Vecter偐傜僟僂儞儘乕僪偟偰壓偝偄丄僀儞僗僩乕儖偼晄梫偱偡丄
夝搥偟偨傜"DataDisplay.exe"傪幚峴偡傞偩偗偱偡丅
屆偄僜僼僩傜偟偔摦嶌娐嫬偑丄乭Windows XP/Me/2000/98乭偱丄巹偺Windows7偼摦嶌偟傑偟偨丅
婲摦偝偣偨傜乽億乕僩偺愝掕夋柺乿偑弌傞偺偱丄乭COM億乕僩乭偲乭儃乕儗乕僩(19200bps)乭傪愝掕偟傑偡丅
僌儔僼夋柺偑昞帵偝傟偨傜丄夋柺偺塃忋偵乽僨乕僞價僢僩挿丗乿偲桳傝傑偡偹丄
偙傟傪"10Bit"偵愝掕偟傑偡丅
DataDisplay.exe偺桳傞僼僅儖僟乕偵"DATALOG"僼僅儖僟乕偑桳傝傑偡丄偙傟偼昞帵偟偨僨乕僞傪
帺摦揑偵曐懚偟偰偄傑偡丄側偺偱偡偑偙傟傪嶍彍偡傞婡擻偑側偄偺偱晄梫側傜掕婜揑偵庤摦偱嶍彍
偟側偄偲僼傽僀儖偼棴傑傞偩偗偱偡偺偱拲堄偑昁梫偱偡丅
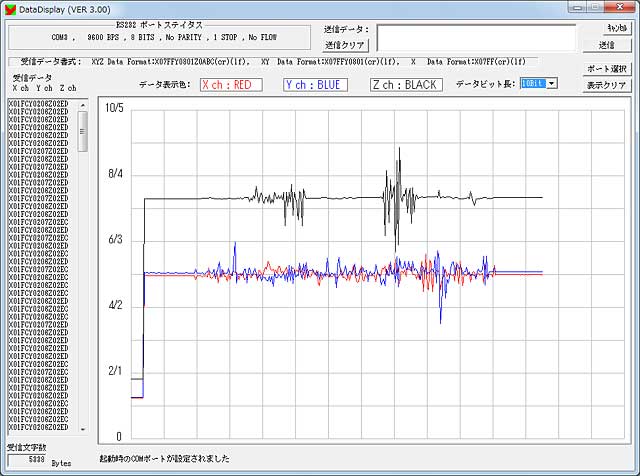
壓偺恾偼丄壛懍搙僙儞僒乕偺奺幉傪俹俠偵憲傝丄偦傟偧傟偺曽岦偵忋壓嵍塃摦偐偟偰傒偨夋柺偱偡丄
倅幉偼婛偵侾俧偺壛懍搙偑偐偐偭偰偄傑偡偹丅(僙儞僒乕抣偦偺傑傑偺抣偱偡)
壓偺恾偼丄僕儍僀儘僙儞僒乕偺奺幉偺妏懍搙(dps)傪昞帵偝偣偰偄傑偡丅
(僙儞僒乕抣偐傜妏懍搙偵曄姺偟偨抣偱偡)
妏懍搙偼丄弌椡抣偵奺儗儞僕偺暘夝擻偺抣傪妡偗傑偡丅(亇250dps側傜0.00875dps傪妡偗傑偡)
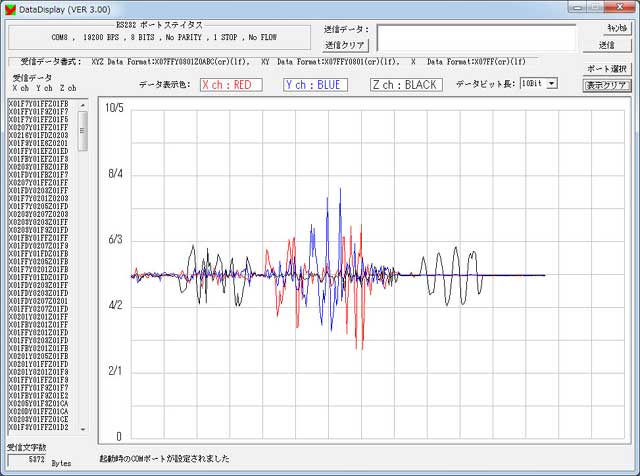
偙傟傪昞帵偝偣傞僒儞僾儖偼乭gyro21.c乭傪摦嶌偝偣傑偡丅
偙偺妏懍搙偱巔惃惂屼偝偣傞偼偪傚偭偲偋擄偟偄偱偟傚偆丄側偺偱妏懍搙傪妏搙偵曄姺偟傑偡丅
曄姺偵偼丄戜宍朄偵傛傝堦掕帪娫偛偲偵掕婜揑偵撉崬傒廃婜枅偺堏摦検傪椵愊壛嶼偡傞偲
慡懱偺堏摦妏搙偲側傞傜偟偂丅
徻偟偄撪梕偼丄僱僢僩偱乭僕儍僀儘僙儞僒乕丂戜宍朄乭側偳偱挷傋偰壓偝偄丅
壓偺恾偑丄妏懍搙傪愊暘偵傛傝妏搙寁嶼偝偣偰昞帵偝偣偨寢壥偱偡丅
(倅幉偺傒嵍塃偵夞揮偝偣偰偄傑偡)
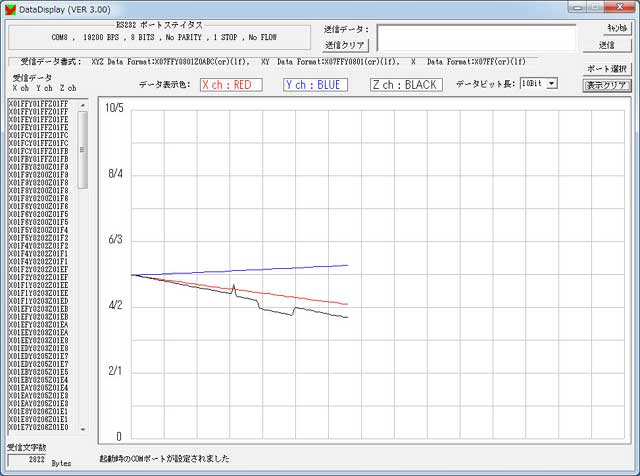
偙傟傪昞帵偝偣傞僒儞僾儖偼乭gyro22.c乭傪摦嶌偝偣傑偡丅
妏搙偼弌偣偨偺偱偡偑偀丄尨揰偑帪娫偲嫟偵偢傟偰峴偭偰偄傑偡(僪儕僼僩尰徾)丅
偙偺庛揰傪崕暈偡傞堊偵僇儖儅儞僼傿儖僞乕傪巊偆帠偵偟傑偡丅
僪儕僼僩偲偼
僙儞僒乕偑惷巭偟偰偄傞偺偵弌椡偑弌傞偲尵偆岆嵎偑惗傑傟傑偡丄
偙傟偼壏搙曄壔傗惷揹梕検偵怳摦摍偺僲僀僘偱敪惗偡傞傜偟偄丄
偙傟傪愊嶼偟偰峴偭偰偄傞偺偱偳傫偳傫偢傟傞偺偱偟傚偆丠
乮攝慄偵偮偄偰乯
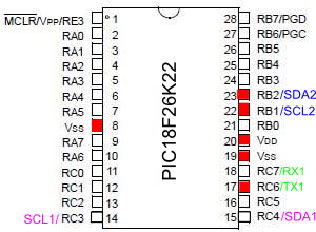
丂嵍恾偼丄18F26K22偺僺儞峔惉偱偡丅
丂夞楬揹尮偼僙儞僒偑3.3V側偺偱3.3V偱偡丅
丂MSSP偼俀夞楬桳傝傑偡偑丄崱夞偺I2C捠怣偼丄
丂SDA2/SCL2傪棙梡偟偰丄僙儞僒偲LCD偵愙懕偟傑偡丅
丂I2C梡偺僾儖傾僢僾掞峈偼丄PIC撪晹偺僾儖傾僢僾傪
丂巊偄傑偡丅
丂LCD偺僾儖傾僢僾梡偺敿揷惙傝偼峴偄傑偣傫丅
俹俠偵乭挻彫宆倀俽俛僔儕傾儖曄姺儌僕儏乕儖乭偱僨乕僞傪憲怣偡傞堊偵USART傪巊偄傑偡偑丄
儌僕儏乕儖抂巕偺攝楍偼嵍偐傜[5V][GND][TX][RX]偱偡丄PIC偐傜偼TX1(RC6)偺憲怣懁偺傒攝慄偟傑偡
[5V]偼USB偐傜弌椡偝傟傞揹尮偱偡偺偱攝慄偼偟側偄偱壓偝偄丅(壓攝慄恾嶲徠)
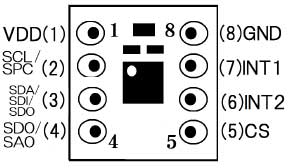 嵍恾偼丄僕儍僀儘僙儞僒乕偺僺儞峔惉偱偡丅
嵍恾偼丄僕儍僀儘僙儞僒乕偺僺儞峔惉偱偡丅
僙儞僒乕偼丄SPI偐I2C偱愙懕偱偒傑偡偑崱夞偼I2C偱偡丅
CS丂丂丂丂 丗I2C愙懕帪偼VDD偵攝慄
SDO/SA0丗I2C愙懕帪偼偙偺僺儞偱傾僪儗僗傪慖戰丅
丂丂丂丂丂丂丂VDD偵愙懕偵偡傞偲傾僪儗僗偼0x6B偱丄
丂丂丂丂丂丂丂GND偵愙懕偵偡傞偲0x6A偱偡丅
丂丂丂丂丂丂丂(崱夞偼GND愙懕偱0x6A偵愝掕)
INT1/INT2丗僀儀儞僩敪惗帪偵捠抦偡傞堊偺妱傝崬傒弌椡僺儞(崱夞偼枹巊梡)
PS,丂*1)
僗僩儘儀儕乕丒儕僫僢僋僗偺儌僕儏乕儖偺応崌偼丄忋恾偺僺儞1-2娫偵VDD_IO僺儞偑偁傝傑偡丄
VDD偵攝慄偡傟偽椙偄偱偟傚偆丅
枖丄忋恾偺僺儞8-7娫偼NC僺儞偱2僺儞憹偊偰偄傑偡丄屻偼摨偠偩偲巚偄傑偡偑摦嶌偝偣偰偄側偄偺偱壗偲傕偱偡丅
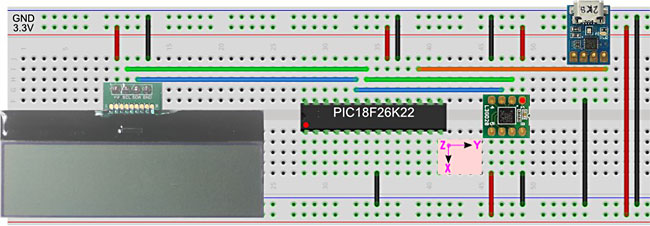
幚懺攝慄恾偱偡丄僙儞僒乕偼塃忋偑侾斣僺儞偱偡丅
忋偺俴俠俢偼偙偪傜偺暔傪巊偭偰偄傑偡丄俴俠俢偼柍偔偰傕偐傑偄傑偣傫偑丄
幚嵺偵偳傫側抣偑弌椡偝傟偰偄傞偐妋擣偟偨曽偑椙偄偱偟傚偆丅
彯丄俴俠俢偵偮偄偰偼丄乭廐寧揹巕俬俀俠愙懕彫宆俴俠俢儌僕儏乕儖偵昞帵傪峴偆乭傪嶲徠壓偝偄丅
崱夞偺PIC18F26K22偺CPU僋儘僢僋偼俇係俵俫倸偱摦嶌偝偣偰偄傑偡丅
伀偙偙偐傜僒儞僾儖僾儘僌儔儉僜乕僗僼傽僀儖傪僟僂儞儘乕僪偟偰壓偝偄丅
L3GD20丏lzh
僾儘僌儔儉僜乕僗傪僟僂儞儘乕僪偟偨傜丄MPLAB X(v2.15)偵偰僾儘僕僃僋僩傪嶌惉偟傑偡丅
埲壓偺僼傽僀儖傪僾儘僕僃僋僩僨傿儗僋僩儕偵僐僺乕偟偰僾儘僕僃僋僩偵庢崬傫偱壓偝偄丅
師偵僐儞僷僀儖偲俹俬俠彂偒崬傒傪幚峴偟偰壓偝偄丅
MPLAB(R) XC8 C Compiler Version 1.32僐儞僷僀儔傪巊梡偟偰偄傑偡丅
僟僂儞儘乕僪僼傽僀儖傪夝搥偡傞偲壓婰偺條側僼傽僀儖峔惉偱偡丅
丂gyro21.cゥゥゥゥゥ{懱偺僒儞僾儖僜乕僗僾儘僌儔儉21(妏懍搙昞帵梡)
丂gyro22cゥゥゥゥゥゥ杮懱偺僒儞僾儖僜乕僗僾儘僌儔儉22(愊暘妏搙昞帵梡)
丂skL3GD20I2C.cゥゥ3GD20娭悢儔僀僽儔儕僜乕僗僼傽僀儖(I2C僶乕僕儑儞)
丂skL3GD20I2C.hゥゥ3GD20儔僀僽儔儕梡僿僢僟僼傽僀儖(I2C僶乕僕儑儞)
丂skI2CLCDlib.cゥゥゥ俬俀俠愙懕俴俠俢娭悢儔僀僽儔儕僜乕僗僼傽僀儖
丂skI2CLCDlib.hゥゥゥ俬俀俠愙懕俴俠俢儔僀僽儔儕梡僿僢僟僼傽僀儖
丂skI2Clib.cゥゥゥゥゥ俬俀俠捠怣傪峴偆娭悢僜乕僗僼傽僀儖
丂skI2Clib.hゥゥゥゥゥ俬俀俠捠怣傪峴偆娭悢偺僿僢僟僼傽僀儖
丂skUARTlib.cゥゥゥゥ倀俽俙俼俿捠怣傪峴偆娭悢僜乕僗僼傽僀儖
丂skUARTlib.hゥゥゥゥ倀俽俙俼俿捠怣傪峴偆娭悢偺僿僢僟僼傽僀儖
丂millis.cゥゥゥゥゥゥv儘僌儔儉婲摦帪偐傜偺帪娫僇僂儞僩傪峴偆娭悢儔僀僽儔儕僜乕僗僼傽僀儖
丂millis.hゥゥゥゥゥゥv儘僌儔儉婲摦帪偐傜偺帪娫僇僂儞僩傪峴偆娭悢梡僿僢僟僼傽僀儖
俢倎倲倎俢倝倱倫倢倎倷梡娭悢偵偮偄偰
偙偺娭悢偼杮懱偺僒儞僾儖僜乕僗僾儘僌儔儉(gyro21.c/gyro22.c)偵婰弎偝傟偰偄傑偡丅
丂ans = DataDisplay(kosu, d1, d2, d3)
丂丂僙儞僒乕偐傜撉崬傫偩僨乕僞傪"DataDisplay"梡偺僨乕僞偵曄姺偡傞張棟
丂丂曄姺僨乕僞偺僼僅乕儅僢僩偼丄僟僂儞儘乕僪偟夝搥偟偨乽DataDisplay偺巊梡朄丏pdf乿傪
丂丂尒偰壓偝偄丅
丂丂丂kosu丂丗俁僠儍儞僱儖偺撪偱丄壗僠儍儞僱儖暘偺僨乕僞傪憲傞偐愝掕(1-3)偟傑偡
丂丂丂d1丂丂丗侾僠儍儞僱儖梡偺僨乕僞(X)傪巜掕偟傑偡
丂丂丂d2丂丂丗俀僠儍儞僱儖梡偺僨乕僞(Y)傪巜掕偟傑偡
丂丂丂d3丂丂丗俁僠儍儞僱儖梡偺僨乕僞(Z)傪巜掕偟傑偡
丂丂丂ans丂 丗曄姺偟偨僨乕僞偺奿擺愭傾僪儗僗傪曉偟傑偡
丂丂椺乯侾僠儍儞僱儖暘偺僨乕僞傪憲傞応崌
int x ;
x = analogRead(3) ;
Serial.print(ADCdisplay(1,x,0,0)) ; // X Ch:RED偱僌儔僼昞帵偝傟傞
倱倠俴俁俧俢俀侽俬俀俠丏們
偙偺儔僀僽儔儕偼L3GD20傪巊偭偨3幉僕儍僀儘僙儞僒儌僕儏乕儖偵傾僋僙僗偡傞堊偺娭悢廤偱偡丅
偙偺娭悢廤偼I2C愙懕側偺偱丄skI2Clib丏c / skI2Clib丏h偺僼傽僀儖偑昁梫偱偡丅
偙偺娭悢廤傪棙梡偡傞応崌偼丄"skI2Clib丏c"偺"InitI2C_Master( )"娭悢傪屇傃弌偟偨屻巊偄傑偡丄
巊偄曽偺椺偼丄"gyro21.c"傪嶲徠壓偝偄丅
L3GD20偵傾僋僙僗傪峴偆娭悢偺巊偄曽傪愢柧偟傑偡丅
丂ans = gyro_Init( )
丂丂L3GD20偺弶婜壔傪峴偆張棟偱偡丅
丂丂傑偢丄"WHO_AN_I"偺傾僪儗僗傪撉傒ID偑惓忢偵摼傜傟傟偽弶婜壔張棟傪峴偄傑偡丅
丂丂僨乕僞儗乕僩偼760Hz偱丄應掕儗儞僕偼亇250偵愝掕偱弶婜壔傪峴偭偰偄傑偡丅
丂丂丂ans 丗 -1側傜L3GD20偑墳摎偟偰偄側偄丄惓忢側傜侽偑曉傝傑偡丅
丂ans = gyro_Read(*X,*Y,*Z)
丂丂L3GD20偺奺幉偺抣傪撉傒崬傓張棟偱偡丅
丂丂XYZ幉偺僙儞僒抣傪撉傒崬傫偱巜掕偺曄悢偵僨乕僞(僙儞僒乕抣偦偺傑傑偺僨乕僞)傪曉偟傑偡丅
丂丂丂*X丂丗 X幉偺抣傪撉傒崬傒偙偺曄悢偵僨乕僞傪曉偡
丂丂丂*Y丂丗 Y幉偺抣傪撉傒崬傒偙偺曄悢偵僨乕僞傪曉偡
丂丂丂*Z丂丗 Z幉偺抣傪撉傒崬傒偙偺曄悢偵僨乕僞傪曉偡
丂丂丂ans 丗 侽亖惓忢丂亅侾亖撉崬傒幐攕(I2C堎忢)
丂ans = gyro_AVEread(su,*X,*Y,*Z)
丂丂L3GD20偺奺幉偺抣傪巜掕偺夞悢(su)偩偗撉崬傒暯嬒壔偟丄妏懍搙偵曄姺偟偨抣傪曉偡張棟偱偡丅
丂丂XYZ幉偺僙儞僒抣傪撉傒崬傫偱巜掕偺曄悢偵僨乕僞傪曉偟傑偡丅
丂丂丂su丂丗 壗夞偺僨乕僞傪撉傒崬傫偱扨弮暯嬒壔偡傞偺偐屄悢傪巜掕
丂丂丂*X丂丗 X幉偺抣傪撉傒崬傒偙偺曄悢偵僨乕僞傪曉偡
丂丂丂*Y丂丗 Y幉偺抣傪撉傒崬傒偙偺曄悢偵僨乕僞傪曉偡
丂丂丂*Z丂丗 Z幉偺抣傪撉傒崬傒偙偺曄悢偵僨乕僞傪曉偡
丂丂丂ans 丗 侽亖惓忢丂亅侾亖撉崬傒幐攕(I2C堎忢)
倱倠俬俀俠俴俠俢倢倝倐丏倛乛倱倠俬俀俠俴俠俢倢倝倐丏們
俬俀俠愙懕俴俠俢偵傾僋僙僗(昞帵)傪峴偆堊偺娭悢廤孮偱偡丅
偙偺撪梕偼偙偪傜偺乽廐寧揹巕俬俀俠愙懕彫宆俴俠俢儌僕儏乕儖偵昞帵傪峴偆乿傪嶲徠壓偝偄丅
扐偟丄
#define _XTAL_FREQ 64000000 // 巊梡偡傞PIC偵傛傝摦嶌廃攇悢抣傪愝掕偡傞
偲彂偒姺偊偰桳傝
倱倠俬俀俠倢倝倐丏倛乛倱倠俬俀俠倢倝倐丏們
偙偺儔僀僽儔儕偼I2C僨僶僀僗(RTC/EEPROM摍)偲愙懕傪峴偆堊偺娭悢廤偱偡丅
偙偺撪梕傕乽廐寧揹巕俬俀俠愙懕彫宆俴俠俢儌僕儏乕儖偵昞帵傪峴偆乿傪嶲徠壓偝偄丅
扐偟丄CPU僋儘僢僋64MHz巇條偵彂偒姺偊偰桳傝丅
倱倠倀俙俼俿倢倝倐丏倛乛倱倠倀俙俼俿倢倝倐丏們
偙偺儔僀僽儔儕偼UART僨僶僀僗偲僔儕傾儖捠怣傪峴偆堊偺娭悢廤偱偡丅
偙偺撪梕偼乭FT232RL巊梡偵傛傝USB傪僔儕傾儖曄姺偟偰儅僀僐儞偲宷偓傑偡乭傪嶲徠壓偝偄丅
倣倝倢倢倝倱丏倛乛倣倝倢倢倝倱丏們
僾儘僌儔儉偺幚峴傪奐巒偟偨帪(婲摦)偐傜尰嵼傑偱偺帪娫傪儈儕昩扨埵偱曉偡娭悢偱偡丅
偙偺撪梕偼乭偙偪傜乭傪嶲徠壓偝偄丅
扐偟丄TIMER0偺愝掕偼CPU僋儘僢僋64MHz巇條偵彂偒姺偊偰桳傝丅
乵師儁乕僕"僇儖儅儞僼傿儖僞乕偺専徹"傊乶
儕儞僋偺尒捈偟(*1) 2020/03/17
亂偒傓拑岺朳僈儗乕僕僴僂僗亃
Copyright (C) 2006-2020 Shigehiro Kimura All Rights Reserved.