�����g�Z���T�[�ŕ��̂̋����𑪂��Ă݂܂�
�k�o�h�b�̓�����������ɖ߂�l
�@���̂̋����𑪂�ɂ͐F�X�L��܂����A�悸�ߋ���(0cm-3cm��)�̕��̂𑪂�ƌ����܂���
���̂̑��݂����m����ׂ̃Z���T�[���A
�ߐڃZ���T�[(���C�Z���T�[)��[�h�X�C�b�`�Ɍ��d�Z���T�[(�t�H�g�Z���T�[)�ł��B
�ߐڃZ���T�[�E�t�H�g�Z���T�[�̘b�����������Q�Ƃ��ĉ������B
�����Ē�����(3cm-5m��)�̕��̂𑪂�̂ɒ����g�����Z���T�[�ƐԊO�������Z���T�[�ł��B
�Ō�ɒ�����(5m-���Sm)�̕��̂𑪂�̂ɂ̓��[�U�[�����Z���T�[�ł��傤���B
���A�ԊO�������Z���T�[�ɂ��Ă����������Q�Ƃ��ĉ������B
���̃y�[�W�ł�PIC16F1827���g���������g�����Z���T�[�ɂ��ċL�q���܂��B
�܂��AArduino�Œ����g�����Z���T�[�𗘗p����ꍇ���������̋L�����Q�Ɖ������B
�l�Ԃɕ������鉹�̎��g���́A��30Hz�`20kHz�ʂƌ����Ă܂��A���͈̔͂������g�Ƃ��܂��B
�����āA20kHz�`��GHz���g�ƌ����A����̃Z���T�[��40KHz�̉����o���܂��B
���Ȃ݂ɂ��A����80KHz�܂ł͕�������炵���A�܂��A�R�E������20KHz�`100KHz���o���炵���B
�܂��A�����g�͐F�X�ȕ���ŗ��p����Ă��܂��A�\�i�[�⋛�Q�T�m�@(���[�@)�ɁA
��ÊW�ł͒����g���Ê�(ME)�⒴���g�����Ȃǂł��ˁB
�ェ�A���g�̐����Ƃ��āA�d�g����ɔ�ׂ���`�����x�͌��\�x���ł��A����ɑ��x�͂��̕�����
��Ԃ≷�x�E���x�E���͂Ȃǂɂ��ω����܂��B
�Ȃ̂ŁA�����ł����x�̂悢���������߂�Ȃ牷�x�Z���T�[��t���ĕ�����鎖��i�߂܂��B
��C���̉��̓`�����x�͖�340m/s�ł����A�����ł͖�1530m/s�ł��A�S�ł͖�5km/s�ł��B
�����g�̓`�����x�͢�C�́��t�́��ọ̋�̏��œ`�����x(����)���ǂ��Ȃ�܂��B
���A���p����Z���T�[�͋p�ł���A�Ԉ��Ȃ��l�ɁB
�s�z���}�t
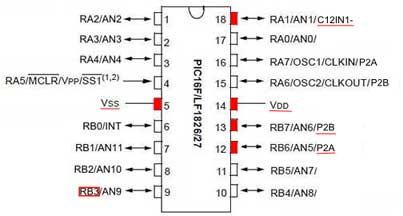 ����g�p����s���ԍ��́A
����g�p����s���ԍ��́A
14��(VDD)��5��(VSS)�̓d���ƁA
18��(C12IN1-)�͎�M�Z���T�[�����
�M�����R���p���[�^�ɓ��͂��܂��A
12��(P2A)��13��(P2B)�ő��M�Z���T�[��
PWM�o�͂��s���܂��B
�܂��A�����̕\���p��9��(RB3)����A�ʓr�쐬����
�����LCD���j�^�[�ɏo�͂��Ă��܂��B
�H���d�q���������̃Z���T�[�𗘗p������H�ł��B
��H�̓f�[�^�V�[�g(���i�ɕt��)�ɋL�ڂ̎�M��H���莝���̕��i�ō\�����܂����B
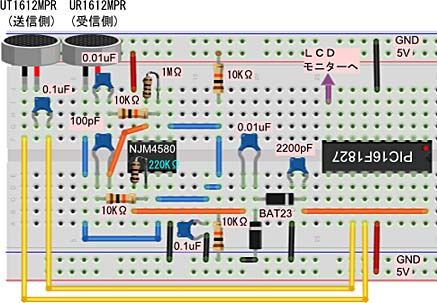 16F1827�͉E�オ1�ԃs����NJM4580D�͍�����1�ԃs���ł��B
16F1827�͉E�オ1�ԃs����NJM4580D�͍�����1�ԃs���ł��B
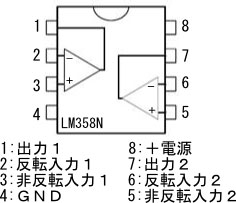
���}��LM358N�ł���NJM4580D��
�����ł��B
�@
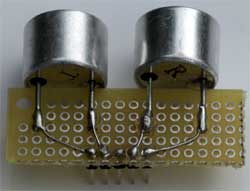 �Z���T�[�̓u���b�h�{�[�h�ɂ͎h����܂���A�Ȃ̂ŁA���}�̗l�ȕ������܂����B
�Z���T�[�̓u���b�h�{�[�h�ɂ͎h����܂���A�Ȃ̂ŁA���}�̗l�ȕ������܂����B
��M�Z���T�[�̏o�͂��I�y�A���vNJM4580D�̂P��H�ڂ�100�{�������A
�Q��H�ڂ�22�{�����Ȃ̂�2200�{�̌𗬑���(���]����)���s���Ă��܂��A
���̐M�����V���b�g�L�[�E�o���A�E�_�C�I�[�h(BAT23)���g�p���Ĕ��g����(����)�ɂ�
�����g�M�������o����ׂɌ��g���s���Ă��܂��B
�ŁA���̌��PIC�����̃R���p���[�^��H�ɐM������͂��Ă��܂��B
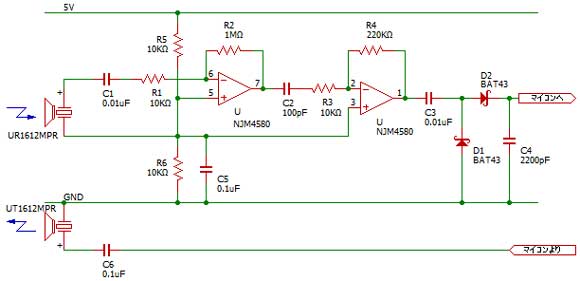
��̔z���}�ɂ́ANJM4580D�̓d���ڑ����Ȃ��Ă��܂����ӊ肢�܂��B
�܂��A���M�Z���T�[��H�Ŏ��Ԕz���}�Ɖ�H�}�Ŕz�����قȂ��Ă��鎖�ɂ����ӂ��ĉ������B
���A�Q�C���������s�������l��220K����R��100k�`330k���ӂ�ōs���Ă݂ĉ������B
�Z���T�[���̂͂S���܂�OK�̗l�ł����A���̉�H�ł�3cm�`160cm�܂ł�������o���܂���B
���M���Z���T�[�̓d����20Vp-p�܂�OK�Ȃ̂ő��M�o�͓d�����グ���������L�����
�v���܂������D�D�D�D
���Ӂj�V���b�g�L�[�E�o���A�E�_�C�I�[�h��BAT23�͎�ɓ���ɂ��������ł��̂�BAT43���g�p���������B
���M�������g�Z���T�[�̐���ɂ���
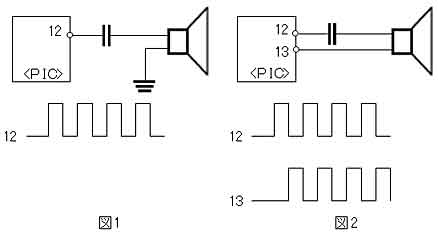
PIC����40KHz��PWM�M����}1�̗l�ɏo�͐�����s�����ꍇ��70cm����������o���܂��A
PIC���V���O��PWM�X�e�A�����O�����𗘗p���Đ}2�̗l��40KHz��PWM�M�����o�͂����ꍇ��
160cm�܂ő���\�ł��B
����͐}2�̗l��12�ԃs����HIGH����13�ԃs����LOW���o�͂���l�ɔ��]�����܂�(�����o��)�A
����𑊕�PWM�o�͐���ƌ����܂��A����ɂ��}1(5Vp-p)���}2(10Vp-p)�̕����Z���T�[�ւ�
���M�o�͓d��(p-p)���2�{���߂鎖���o���܂��B
�s�T���v���v���O�����t
���̃v���O�����ɂ̓f�o�b�O���j�^�[�v���O�����uskMonitorLCD.c�v�uskMonitorLCD.h�v���K�v�ł��B
�f�o�b�O�k�b�c���j�^�[�ɂ��Ă����������Q�Ƃ��ĉ������B
�uskMonitorLCD.c�v�͑��M�f�[�^��Timer2�̃^�C�~���O�ő���l�ɕύX���܂����A
���ׂ̈ɉ��L�v���O������ύX���Ă��܂��B�@*1)
�܂��ALCD���j�^�[�̏o�͂�RB3����s���Ă���̂ŁuskMonitorLCD.h�v�����L�̗l�ɕύX���܂��B
#define _XTAL_FREQ 8000000 // �g�p����PIC���ɂ�蓮����g���l��ݒ肷��
#define MONITOR_PIN RB3 // ���j�^�o�͂���s���̔ԍ���ݒ肷��
�@��L�z���}��ʂ̗l�ɔz�����܂��傤�B
�AMPLAB X(v2.15)���N�������܂��B
�B���L���T���v���̃v���O�����\�[�X�ł��A
�@ MPLAB(R) XC8 C Compiler Version 1.32�R���p�C�����g�p���Ă��܂��B
�@ �v���W�F�N�g���쐬�����V�K�t�@�C���ɃR�s�[�y�[�X�g���ē\��t���ĉ������B
�@ �v���O�����\�[�X���_�E�����[�h�����v���W�F�N�g�Ɏ捞�������o���܂��B�@*3)
---------------------------------------------------------------------
#include <xc.h>
#include "skMonitorLCD.h"
#define _XTAL_FREQ 8000000 // delay�p�ɕK�v(�N���b�N8MHz���w��)
#define TIME_OVER 30000 // �����g�Z���T�[���疳�ԓ����̃^�C���A�E�g����(30ms)
#define T1COUT 35536 // �^�C�}�[�P�p�J�E���g�̏����l(65536-30000:30ms�J�E���g)
unsigned int UMS_info ;
// �R���t�B�M�����[�V�����P�̐ݒ�
#pragma config FOSC = INTOSC // �����ۯ����g�p����(INTOSC)
#pragma config WDTE = OFF // �����ޯ����ϰ����(OFF)
#pragma config PWRTE = ON // �d��ON����64ms�����۸��т��J�n����(ON)
#pragma config MCLRE = OFF // �O��ؾ�ĐM���͎g�p���������ٓ���(RA5)��݂Ƃ���(OFF)
#pragma config CP = OFF // ��۸�����ذ��ی삵�Ȃ�(OFF)
#pragma config CPD = OFF // �ް���ذ��ی삵�Ȃ�(OFF)
#pragma config BOREN = ON // �d���d���~���펞�Ď��@�\ON(ON)
#pragma config CLKOUTEN = OFF // CLKOUT��݂�RA6��݂Ŏg�p����(OFF)
#pragma config IESO = OFF // �O���E�����ۯ��̐ؑւ��ł̋N���͂Ȃ�(OFF)
#pragma config FCMEN = OFF // �O���ۯ��Ď����Ȃ�(FCMEN_OFF)
// �R���t�B�M�����[�V�����Q�̐ݒ�
#pragma config WRT = OFF // Flash��ذ��ی삵�Ȃ�(OFF)
#pragma config PLLEN = OFF // ����N���b�N��32MHz�ł͓��삳���Ȃ�(OFF)
#pragma config STVREN = ON // �X�^�b�N���I�[�o�t���[��A���_�[�t���[�����烊�Z�b�g������(ON)
#pragma config BORV = HI // �d���d���~���펞�Ď��d��(2.5V)�ݒ�(HI)
#pragma config LVP = OFF // ��d���v���O���~���O�@�\�g�p���Ȃ�(OFF)
// ���荞�݂̏���
void interrupt InterFunction( void )
{
// �R���p���[�^�֘A�̊����ݏ���
// �Z���T�[����ԓ����������ꍇ�̏���(���̂���̔��˗L��)
if (C2IF == 1) {
TMR1ON = 0 ; // TMR1�J�E���g��~
UMS_info = TMR1L ; // �J�E���g�l���L�^����
UMS_info = UMS_info | (TMR1H << 8) ;
UMS_info = UMS_info - T1COUT ;
TMR1H = (T1COUT >> 8) ; // �J�E���g�l�̍Đݒ�
TMR1L = (T1COUT & 0x00ff) ;
C2IF = 0 ; // �R���p���[�^�����t���O�����Z�b�g
}
// �^�C�}�[�P�̊����ݏ���
// �Z���T�[����ԓ����Ȃ��ꍇ�̏���(���̂���̔��˂��Ȃ��A�߂��ɕ��̂�����)
if (TMR1IF == 1) {
TMR1ON = 0 ; // TMR1�J�E���g��~
UMS_info = TIME_OVER ; // �J�E���g�l�͎��Ԑ�
TMR1H = (T1COUT >> 8) ; // �J�E���g�l�̍Đݒ�
TMR1L = (T1COUT & 0x00ff) ;
TMR1IF = 0 ; // �^�C�}�[1�����t���O�����Z�b�g
}
}
// �����g�Z���T�[���狗����Ǎ��ޏ���
// temp:���݂̉��x��ݒ肷�� correction:�����
int UsonicMeasurRead(int temp,int correction)
{
unsigned long t ;
int ans ;
ans = 0 ;
// �����g�Z���T�[�̑��M����40KHzPWM�M����200us�o�͂��s��
TMR4ON = 1 ; // TMR4(PWM)�X�^�[�g
__delay_us(200) ;
TMR4ON = 0 ; // TMR4(PWM)�X�g�b�v
// �����g�Z���T�[�̎�M������̕ԓ���҂�
TMR1ON = 1 ; // TMR1�J�E���g�J�n
UMS_info = 0 ;
while(UMS_info == 0) ; // ���˔g�̎�M��҂�
// �ԓ����Ԃ��狗�������߂�
if (UMS_info < TIME_OVER) {
t = 331500 + (600 * temp) ; // ���g�̓`�����鑬�x�����߂�
t = (t * UMS_info) / 1000000 ;// �����̌v�Z
ans = t / 2 ; // �����Ȃ̂Ł�2
ans = ans + correction ; // �����̕�l��������
}
return ans ; // mm�̋�����Ԃ�
}
// ���C���̏�����
void main()
{
int val ;
OSCCON = 0b01110010 ; // �����N���b�N�͂W�l�g���Ƃ���
ANSELA = 0b00000010 ; // AN0-AN4��AN1�̂ݎg�p�A���͑S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00000000 ; // AN5-AN11�͎g�p���Ȃ��S�ăf�W�^��I/O�Ƃ���
TRISA = 0b00000010 ; // �s��(RA)��RA1�̂ݓ��́A���͑S�ďo�͂Ɋ����Ă�(RA5�͓��͐�p)
TRISB = 0b00000000 ; // �s��(RB)�͑S�ďo�͂Ɋ����Ă�
PORTA = 0b00000000 ; // RA�o�̓s���̏�����(�S��LOW�ɂ���)
PORTB = 0b00000000 ; // RB�o�̓s���̏�����(�S��LOW�ɂ���)
// ���˔g�����J�E���g�p�^�C�}�[�P�̐ݒ�(1�J�E���g��1us)
T1CON = 0b01110000 ; // �N���b�N�\�[�X��Fosc�A�v���X�P�[��1/8�A
TMR1H = (T1COUT >> 8) ;// 30000(30ms)�܂ŃJ�E���g������
TMR1L = (T1COUT & 0x00ff) ;
TMR1IF = 0 ; // TIMER1�̃t���O��0�ɂ���
TMR1IE = 1 ; // TIMER1�̊����݂�������
// �o�v�l�̐ݒ�(CCP2�ŃV���O���o��:�^�C�}�[�S�g�p)
CCP2CON = 0b00001101 ; // PWM�@�\(�V���O���o��:������s��)���g�p
CCP2SEL = 0 ; // P2A��12�ԃs����RB6���g�p����
P2BSEL = 0 ; // P2B��13�ԃs����RB7���g�p����
PSTR2CON= 0b00000011 ; // P2A��PWM�o�͂���AP2B�͔��]�o��
CCPTMRS = 0b00000100 ; // ECCP2�@�\��Timer4���g�p����
T4CON = 0b00000000 ; // TMR4�v���X�P�[���l���P�{�ɐݒ�
CCPR2L = 24 ; // �f���[�e�B�l�͂�50���قǂŏ�����
CCPR2H = 0 ;
TMR4 = 0 ; // �^�C�}�[4�J�E���^�[��������
PR4 = 49 ; // PWM�̎�����ݒ�i40KHz�Őݒ�j
// �c�`�b�̐ݒ�(��2.0V���R���p���[�^��臒l�Ƃ���)
DACCON0 = 0b11000000 ; // VDD/VSS���g�p�ADACOUT�s��(RA2)�g��Ȃ�
DACCON1 = 13 ; // ��2.0V���o��( 5V*(13/2^5)=2.03125 )
// �R���p���[�^�Q�̐ݒ�(�����݂ŗ��p)
CM2CON0 = 0b10010110 ; // �|���{��ON�A�������[�h�A�o�͔͂��]�A�q�X�e���V�X�L��
CM2CON1 = 0b10010001 ; // �����Ŋ����ݗ��p�A�{��DAC���́A�|��RA1�������
C2IF = 0 ; // �R���p���[�^�Q�����t���O��0�ɂ���
C2IE = 1 ; // �R���p���[�^�Q�����݂�������
// ���ӑ��u�S�̂̊��荞�݂�����
PEIE = 1 ; // ���ӑ��u���荞�ݗL��
GIE = 1 ; // �S�����ݏ�����������
// �k�b�c���j�^�[�ɑ��M�o����l�ɏ���������
MonitorInit() ;
while(1) {
// LCD���j�^�[��ʂ̏������s��
MonitorPutc(0x11) ;
MonitorPuts(" ") ;
MonitorPutc(0x11) ;
// 20���ƌ������ŃZ���T�[���狗����Ǎ��ށA20mm���덷���L��̂ő����Ēu��
val = UsonicMeasurRead(20,20) ;
// ���j�^�[�ɂ����ŕ\�����s��
MonitorPutd((unsigned char)(val/10)) ;
MonitorPuts("cm") ;
// 1�b��ɌJ��Ԃ�(�A���ōs���ꍇ�ł��Œ�50ms�͋鎖)
__delay_ms(1000) ;
}
}
---------------------------------------------------------------------
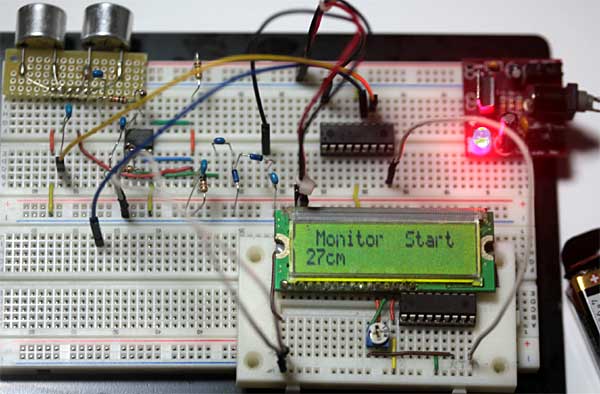
�C�R���p�C�����o�h�b�������������s���ĉ������B
�DPIC���u���b�h�{�[�h�Ɏ�t���ē������A1�b����LCD���j�^�[�ɋ���(cm)��\�����܂��B
���M��Z���T�[��40KHz�̐M����200us�o�͂��܂��A40KHz�M����PIC��CCP2��
�V���O��PWM�@�\(����PWM����)�𗘗p��P2A(12�ԃs��)��P2B(13�ԃs��)����o�͂��Ă��܂��B
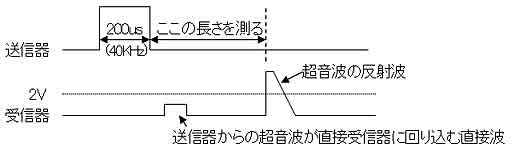
���̌�AC12IN1-(RA1:18�ԃs��)����M��Z���T�̒l��PIC�����̃R���p���[�^�ɓ��͂��Ă��܂��B
�R���p���[�^�́{����PIC������DAC��H���2.0V�d�������ē��͂�臒l�Ƃ��Ă��܂��A
�Ȃ̂ł��A��M��Z���T�[�l��2.0V����̒l�ł���Δ��˔g���L�����Ɣ��f���܂��A
�ł��A���˔g���L��Ί����݂��������܂��B(���M�킩���荞�ޒ��ڔg���L��ׂ�2.0V�Ƃ��Ă��܂�)
�܂��A���̊Ԃ̎����J�E���g�̓^�C�}�[�P�𗘗p���A30ms�ȏ㔽�˔g�����������ꍇ�̓^�C���A�E�g�ł��B
�����g�Z���T�[���狗������̐���
ans = UsonicMeasurRead(temp,correction)
�@�@temp�@�@�@�F�����g���ӂ̉��x���w�肵�܂�(�����20����ݒ�)
�@�@correction�F�����̕�l���w�肵�܂�(�����20mm��ݒ�)
�@�@ans�@�@�@�@�F�����������ŕԂ��܂��A���˔g�����������ꍇ�͂O��Ԃ��܂��B
�@�@�����ł������ł����m�ȋ����𑪂肽���l�͉��x�Z���T�[��t���ĕ���s���ĉ������B
�@�@�܂��A����̂��̉�H�ł͂ǂ̋����ł���ɖ�20mm���Z�����ʂ���܂����A
�@�@�Ȃ̂ŋ�����l20mm����Ă��܂��B
�^�C�}�[�P�@�\
�^�C�}�[�P�ɂ��Ă��������̋L�����Q�l�ɂ��ĉ������B
�V���O���o�v�l�@�\
�����CCP2��Timer4���g�p���Ă��܂��A����Timer��CCP1�𗘗p����ꍇ���������̋L�����Q�l��
���ĉ������B
�R���p���[�^�̐ݒ�
�@�R���p���[�^�Ƃ́A��̃\�[�X�d��(+-�`�����l��)���r���A
�@�ǂ��炪�傫�����ŏo�͂̋ɐ� HIGH(1)/LOW(0)��Ԃ��ؑւ���H�ł��B
�@16F1827�ɂ̓R���p���[�^�P�ƂQ�łQ�g�p�o���܂��A���L�͂Q�ł̐ݒ�ł��B
�@CM2CON0 = 0b10010110 ;
�@�@(���Ȃ݂ɁA�E���獶��bit0�`bit7�̏��Ő����܂���)
�@�@bit1�F1 = �R���p���[�^�̃q�X�e���V�X�@�\�͗L��
�@�@�@�@�@0 = �R���p���[�^�̃q�X�e���V�X�@�\�͖���
�@�@bit2�F1 = �R���p���[�^�́A�W���d�͂̍������[�h�œ��삷��
�@�@�@�@�@0 = �R���p���[�^�́A��d�͂̒ᑬ���[�h�œ��삷��
�@�@bit4�F1 = �R���p���[�^�o�͔͂��]
�@�@�@�@�@0 = �R���p���[�^�o�͔͂]
�@�@bit5�F1 = �R���p���[�^�̏o�͂��O���s���ɏo��
�@�@�@�@�@0 = �R���p���[�^�̏o�͓͂����Ŏg�p����
�@�@bit6�F�R���p���[�^�̓��͂ɑ���o�͋ɐ������߂�
�@�@�@�@�@bit4 = 1 �̏ꍇ
�@�@�@�@�@�{�@���@�|�@���ɏo�͂͂P
�@�@�@�@�@�{�@���@�|�@���ɏo�͂͂O
�@�@�@�@�@bit4 = 0 �̏ꍇ
�@�@�@�@�@�{�@���@�|�@���ɏo�͂͂O
�@�@�@�@�@�{�@���@�|�@���ɏo�͂͂P
�@�@bit7�F1 = �R���p���[�^�͗L��
�@�@�@�@�@0 = �R���p���[�^�͖���
�@CM2CON1 = 0b10010001 ;
�@�@bit0-1�F�R���p���[�^�́|�����̓`���l���I���r�b�g
�@�@�@�@�@�@00 = C12IN0-(RA0/17�ԃs��)����\�[�X�M������͂���
�@�@�@�@�@�@01 = C12IN1-(RA1/18�ԃs��)����\�[�X�M������͂���
�@�@�@�@�@�@10 = C12IN2-(RA2/ 1�ԃs��)����\�[�X�M������͂���
�@�@�@�@�@�@11 = C12IN3-(RA3/ 2�ԃs��)����\�[�X�M������͂���
�@�@�@�@�@�@�����C12IN1-(18�ԃs��)�𗘗p�ł����A���̃s�����g�p����ꍇ�Y���s����
�@�@�@�@�@�@ANSELA/TRISA���W�X�^�[�ŃA�i���O���͂Őݒ肷��K�v���L��܂��B
�@�@bit2-3�F�R���p���[�^�́{�����̓`���l���I���r�b�g
�@�@�@�@�@�@00 = C12IN+((RA2/ 1�ԃs��)����̓d����臒l���͂��� (��1)
�@�@�@�@�@�@01 = PIC����DAC����̓d����臒l���͂���
�@�@�@�@�@�@10 = PIC�����̌Œ�d�� FVR(1.024V/2.048V/4.096V)����̓d����臒l���͂���
�@�@�@�@�@�@11 = GND�ɐڑ�����
�@�@bit6�F�o�̗͂�����Ŋ����݂𗘗p����ꍇ�͂P�Ƃ���A�����p�Ȃ�O�ł�
�@�@bit7�F�o�̗͂����Ŋ����݂𗘗p����ꍇ�͂P�Ƃ���A�����p�Ȃ�O�ł�
�@(��1)�@�R���p���[�^�P�̎���C1IN+(RA3/ 2�ԃs��)�ƂȂ�܂��A
�@�@�@�@�@�܂��A���W�X�^�[���͂��ꂼ��CM1CON0/CM1CON1�ɕύX���ĉ������B
�c�`�b�̐ݒ�
�@DAC��PIC������VDD�ɔ�Ⴕ�����܂��܂ȓd�����t�@�����X���o�͂ł���@�\�ł��B
�@DACCON0 = 0b11000000 ;
�@�@bit0�F�|���̃\�[�X�d���I���r�b�g(VSOURCE-)
�@�@�@�@�@1 = VREF-(RA2/ 1�ԃs��)�[�q�ڑ���I������
�@�@�@�@�@0 = PIC�ڑ���GND(VSS)��I������
�@�@bit2-3�F�{���̃\�[�X�d���I���r�b�g(VSOURCE+)
�@�@�@�@�@00= PIC�ڑ��́{�d��(VDD)��I������
�@�@�@�@�@01= VREF+(RA3/ 2�ԃs��)�[�q�ڑ���I������
�@�@�@�@�@10= PIC�����̌Œ�d�� FVR(1.024V/2.048V/4.096V)��I������
�@�@bit5�F1 = DACOUT(RA2/ 1�ԃs��)�[�q����d�����t�@�����X���o�͂���
�@�@�@�@�@0 = DACOUT�s���o�͕s��
�@�@bit6�F1 = ��d�͏�Ԏ��Ɂ{���̃\�[�X�d����I�����A�|���͐�
�@�@�@�@�@0 = ��d�͏�Ԏ��Ɂ|���̃\�[�X�d����I�����A�{���͐�
�@�@bit7�F1 = DAC�͗L��
�@�@�@�@�@0 = DAC�͖���
�@DACCON1 = 13 ;
�@�@�o�͂���d����ݒ肵�܂��B
�@�@�o�͓d�� = ((VSOURCE+) - (VSOURCE-))*(DACCON1/(2^5)) + VSOURCE-
�@�@VSOURCE+ = 5V�@�@VSOURCE- = 0V�@�@DACCON1 = 13�@�Ȃ�@5V*(13/2^5)=2.03125
�@�@DACCON1�͂O�`�R�P�͈̔͂Ƃ���B
�s���̑��t
�������i�ł��B
�ԊO�������Z���T�[���͒����g�Z���T�[�̕��������͐��m�ɑ���܂��B
���M�o�͓d�����グ���������L���������o���܂��B
9V�`12V�̕ʓd����p�ӂ��ăg�����W�X�^�[���e�d�s���g���ďo�͂��邩���A
���5V�d���Ȃ�MAX232��RS232C�p���x���ϊ�IC�𗘗p���邩���A�ł��傤���B
�������ꍇ�́A���M�Z���T�[����̒��ڔg����荞�܂Ȃ��l�ȍH�v���K�v�����ˁB
�܂��A�������ƎG�����������Ȃ苗�����҂��邩���ˁB
�܂��A�F�X�g���C���������Ă݂Ă݂āB
����Ƃ��A�����g�̔��˂̓K���X�E���E�S���E�E�����E�R���N���[�g����100�����˂��܂����A
�z�ށE�ȁE�O���X�E�[���Ȃǂ̕��͉̂����z�����܂��A�Ȃ̂ł����̌��o�͖������ۂ��ł���B
MPLAB X�p�ɋL���ύX(*3) 2015/10/10
��H�}�̒lj�(*2) 2014/02/06
"skMonitorLCD.c"�ύX�ɂ��T���v���v���O�����ύX(*1) 2014/02/01
�y���ޒ��H�[�K���[�W�n�E�X�z
Copyright (C) 2006-2015 Shigehiro Kimura All Rights Reserved.