�i �P�^�U �j�i �Q�^�U �j�@�i �S�^�U �j�i �T�^�U �j�i �U�^�U �j�@ �k�}�C�R���̃g�b�v�ɖ߂�l
 �@�h�c�d�ɉ��L�̃X�P�b�`�v���O�������R�s�[�y�[�X�g���ē\��t���ĉ������B
�@�h�c�d�ɉ��L�̃X�P�b�`�v���O�������R�s�[�y�[�X�g���ē\��t���ĉ������B
---------------------------------------------------------------------
#include <ctype.h>
#include <string.h>
#include <Wire.h>
// �d���N�����ƃ��Z�b�g�̎������̂ݏ��������
void setup()
{
Serial.begin(9600) ; // �V���A���ʐM�̏�����
Wire.begin() ; // �h�Q�b�̏������A�}�X�^�[�Ƃ���
delay(5000) ; // �T�b��ɊJ�n
}
// �J��Ԃ����s����郁�C���̏�����
void loop()
{
int ans , i , j ;
char dt[8] ;
for (i=1 ; i<=3 ; i++) {
if (i==1) memcpy(dt,"01",2) ;
if (i==2) memcpy(dt,"23",2) ;
if (i==3) memcpy(dt,"45",2) ;
Wire.beginTransmission(8) ; // �ʐM�̊J�n����
Wire.write((byte *)dt,2) ; // �ʐM�f�[�^����������
ans = Wire.endTransmission() ;// �f�[�^�̑��M�ƏI������
delay(100) ; // �X���[�u���f�[�^����������܂ő҂�
ans = Wire.requestFrom(8,7) ; // �X���[�u(8)�Ƀf�[�^���M�v��(7�o�C�g��M)������
for (j=0 ; j<ans ; j++) { // ��M�����f�[�^�̌������J��Ԃ�
dt[j] = Wire.read() ; // �P�o�C�g x �V��̃f�[�^�����o��
}
dt[j] = 0x00 ;
Serial.println(dt) ; // �h�c�d�ɃV���A���ʐM�ŕ\������
delay(1000) ; // �P�b�E�G�C�g
}
}
---------------------------------------------------------------------
�o�h�b(12F1822)���X���[�u�̃v���O������
---------------------------------------------------------------------
#include <pic.h>
#include <htc.h> // delay�p�ɕK�v
#include <string.h>
#include "skI2Cslave.h" // I2C�����C�u�����[�p
#define _XTAL_FREQ 8000000 // delay�p�ɕK�v(�N���b�N8MHz���w��)
// �R���t�B�M�����[�V�����P�̐ݒ�
// CLKOUT��݂�RA4��݂Ŏg�p����(CLKOUTEN_OFF)�F�����ۯ��g�p����(INTIO)
// �O���ۯ��Ď����Ȃ�(FCMEN_OFF)�F�O���E�����ۯ��̐ؑւ��ł̋N���͂Ȃ�(IESO_OFF)
// �d���d���~���펞�Ď��@�\ON(BOREN_ON)�F�����ޯ����ϰ����(WDTE_OFF)
// �d��ON����64ms�����۸��т��J�n����(PWRTEN_ON)
// �O��ؾ�ĐM���͎g�p���������ٓ���(RA3)��݂Ƃ���(MCLRE_OFF)
// ��۸�����ذ��ی삵�Ȃ�(CP_OFF)�F�ް���ذ��ی삵�Ȃ�(CPD_OFF)
__CONFIG(CLKOUTEN_OFF & FOSC_INTOSC & FCMEN_OFF & IESO_OFF & BOREN_ON &
PWRTE_ON & WDTE_OFF & MCLRE_OFF & CP_OFF & CPD_OFF) ;
// �R���t�B�M�����[�V�����Q�̐ݒ�
// ����N���b�N��32MHz�ł͓��삳���Ȃ�(PLLEN_OFF)
// �X�^�b�N���I�[�o�t���[��A���_�[�t���[�����烊�Z�b�g������(STVREN_ON)
// ��d���v���O���~���O�@�\�g�p���Ȃ�(LVP_OFF)
// Flash��ذ��ی삵�Ȃ�(WRT_OFF)�F�d���d���~���펞�Ď��d��(2.5V)�ݒ�(BORV_25)
__CONFIG(PLLEN_OFF & STVREN_ON & WRT_OFF & BORV_25 & LVP_OFF);
// ���C���̏���
void main()
{
int ans ;
OSCCON = 0b01110010 ; // �����N���b�N��8�l�g���Ƃ���
ANSELA = 0b00000000 ; // �A�i���O�g�p���Ȃ�(���ׂăf�W�^��I/O�Ɋ����Ă�)
TRISA = 0b00001110 ; // �s����RA1(SCL)/RA2(SDA)�̂ݓ���(RA3�͓��͐�p)
PORTA = 0b00000000 ; // �o�̓s���̏�����(�S��LOW�ɂ���)
InitI2C_Slave(8) ; // �X���[�u���[�h�ł̏������A�}�C�A�h���X��8�Ƃ���
while(1) {
ans = I2C_ReceiveCheck() ; // ��M��Ԃ̃`�F�b�N
if (ans >= 2) {
if ((rcv_data[0]==0x30) && (rcv_data[1]==0x31)) { // "01"�R�}���h
memcpy(snd_data,"Arduino",7) ;
}
if ((rcv_data[0]==0x32) && (rcv_data[1]==0x33)) { // "23"�R�}���h
memcpy(snd_data,"12F1822",7) ;
}
if ((rcv_data[0]==0x34) && (rcv_data[1]==0x35)) { // "45"�R�}���h
memcpy(snd_data,"16F1827",7) ;
}
}
}
}
---------------------------------------------------------------------


---------------------------------------------------------------------
#include <pic.h>
#include <htc.h> // delay�p�ɕK�v
#include "skMonitorLCD.h"
#define _XTAL_FREQ 8000000 // delay�p�ɕK�v(�N���b�N8MHz���w��)
// �R���t�B�M�����[�V�����P�̐ݒ�
// CLKOUT��݂�RA4��݂Ŏg�p����(CLKOUTEN_OFF)�F�����ۯ��g�p����(INTIO)
// �O���ۯ��Ď����Ȃ�(FCMEN_OFF)�F�O���E�����ۯ��̐ؑւ��ł̋N���͂Ȃ�(IESO_OFF)
// �d���d���~���펞�Ď��@�\ON(BOREN_ON)�F�d��ON����64ms�����۸��т��J�n����(PWRTEN_ON)
// �����ޯ����ϰ����(WDTE_OFF)�F
// �O��ؾ�ĐM���͎g�p���������ٓ���(RA3)��݂Ƃ���(MCLRE_OFF)
// ��۸�����ذ��ی삵�Ȃ�(CP_OFF)�F�ް���ذ��ی삵�Ȃ�(CPD_OFF)
__CONFIG(CLKOUTEN_OFF & FOSC_INTOSC & FCMEN_OFF & IESO_OFF & BOREN_ON &
PWRTE_ON & WDTE_OFF & MCLRE_OFF & CP_OFF & CPD_OFF) ;
// �R���t�B�M�����[�V�����Q�̐ݒ�
// ����N���b�N��32MHz�ł͓��삳���Ȃ�(PLLEN_OFF)
// �X�^�b�N���I�[�o�t���[��A���_�[�t���[�����烊�Z�b�g������(STVREN_ON)
// ��d���v���O���~���O�@�\�g�p���Ȃ�(LVP_OFF)
// Flash��ذ��ی삵�Ȃ�(WRT_OFF)�F�d���d���~���펞�Ď��d��(2.5V)�ݒ�(BORV_25)
__CONFIG(PLLEN_OFF & STVREN_ON & WRT_OFF & BORV_25 & LVP_OFF);
// �h�Q�b�֘A�̊��荞�ݏ���
void interrupt InterI2C( void )
{
if (SSP1IF == 1) { // SSP(I2C)���荞�ݔ������H
SSP1IF = 0 ; // �t���O�N���A
}
if (BCL1IF == 1) { // MSSP(I2C)�o�X�Փˊ��荞�ݔ������H
BCL1IF = 0 ; // ����̓t���O�̂݃N���A����(������)
}
}
// �A�C�h����Ԃ̃`�F�b�N
// ACKEN RCEN PEN RSEN SEN R/W (BF) ���S�ĂO�Ȃ�n�j
void I2C_IdleCheck(char mask)
{
while (( SSP1CON2 & 0x1F ) | (SSP1STAT & mask)) ;
}
// ���C���̏���
void main()
{
unsigned char dt ;
int i ;
OSCCON = 0b01110010 ; // �����N���b�N��8�l�g���Ƃ���
ANSELA = 0b00000000 ; // �A�i���O�͎g�p���Ȃ��i���ׂăf�W�^��I/O�Ɋ����Ă�j
TRISA = 0b00001110 ; // �s����RA1/RA2�̂ݓ���(RA3�͓��͐�p)
PORTA = 0b00000000 ; // �o�̓s���̏�����(�S��LOW�ɂ���)
// �h�Q�b(�}�X�^�[���[�h)�̏�����
SSP1STAT= 0b10000000 ; // �W�����x���[�h�ɐݒ肷��(100kHz)
SSP1CON1= 0b00101000 ; // SDA(RA2)/SCL(RA1)�s����I2C�Ŏg�p���A�}�X�^�[���[�h�Ƃ���
SSP1ADD = 0x13 ; // �N���b�N=FOSC/((SSPADD + 1)*4) 8MHz/((0x13+1)*4)=0.1(100KHz)
SSP1IE = 1 ; // SSP(I2C)���荞�݂�������
BCL1IE = 1 ; // MSSP(I2C)�o�X�Փˊ��荞�݂�������
PEIE = 1 ; // ���ӑ��u���荞�݂�������
GIE = 1 ; // �S���荞�ݏ�����������
SSP1IF = 0 ; // SSP(I2C)���荞�݃t���O���N���A����
BCL1IF = 0 ; // MSSP(I2C)�o�X�Փˊ��荞�݃t���O���N���A����
__delay_ms(2000) ;
MonitorPutc(0x11) ; // ���j�^�[�̕\���ʒu��ݒ肷��
__delay_ms(3000) ; // �T�b��ɊJ�n����
while(1) {
// �p������"�O"�`"�X"���P�o�C�g���J��Ԃ�����
for (i=0x30 ; i<=0x39 ; i++) {
// �X�^�[�g(START CONDITION)
I2C_IdleCheck(0x5) ;
SSP1CON2bits.SEN = 1 ;
// [�X���[�u�̃A�h���X+�X���[�u�͎�M(�����ݗv��)]�𑗐M����
I2C_IdleCheck(0x5) ;
SSP1BUF = (char)(10 << 1) ; // �A�h���X��10 R/W=0
while(SSP1CON2bits.ACKSTAT==1) ;
// [�f�[�^]�𑗐M����
I2C_IdleCheck(0x5) ;
SSP1BUF = (char)i ;
while(SSP1CON2bits.ACKSTAT==1) ;
// ���s�[�g�E�X�^�[�g(REPEATED START CONDITION)
I2C_IdleCheck(0x5) ;
SSP1CON2bits.RSEN = 1 ;
// [�X���[�u�̃A�h���X+�X���[�u�փf�[�^���M�v��]�𑗐M����
I2C_IdleCheck(0x5) ;
SSP1BUF = (char)((10 << 1)+1) ; // �A�h���X��10 R/W=1
while(SSP1CON2bits.ACKSTAT==1) ;
// [�f�[�^]����M����
I2C_IdleCheck(0x5) ;
SSP1CON2bits.RCEN = 1 ; // ��M��������
I2C_IdleCheck(0x4) ;
dt = SSP1BUF ; // ��M
I2C_IdleCheck(0x5) ;
SSP1CON2bits.ACKDT = 1 ; // ACK�f�[�^��NOACK
SSP1CON2bits.ACKEN = 1 ; // ACK�f�[�^��Ԃ�
// �X�g�b�v(STOP CONDITION)
I2C_IdleCheck(0x5) ;
SSP1CON2bits.PEN = 1 ;
// ���j�^�[�Ɏ�M�f�[�^�𑗂�
MonitorPutc(dt) ;
// 1�b�E�G�C�g
__delay_ms(1000) ;
}
}
}
---------------------------------------------------------------------
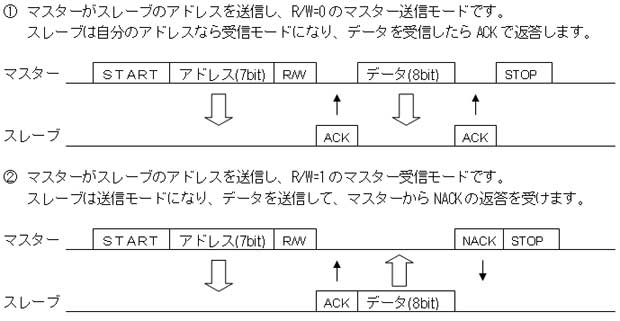
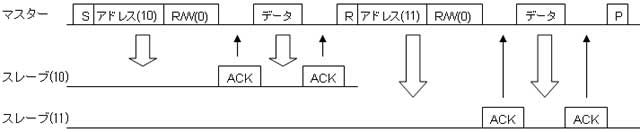
�����s�[�g�X�^�[�g�@�\��PIC��PIC�ł̒ʐM�͂n�j�ł������A

�m�O�y�[�W"PIC(�}�X�^�[)-Arduino(�X���[�u"�ցn
�m���y�[�W"PIC�ł̃}���`�}�X�^�[�̒ʐM"�ցn
�NjL(*2) 2020/03/05
�NjL(*1) 2012/09/14
�y���ޒ��H�[�K���[�W�n�E�X�z
Copyright (C) 2006-2020 Shigehiro Kimura All Rights Reserved.