俁幉壛懍搙僙儞僒偱孹幬妏搙傪應掕偟偰傒傑偡
乲俙倰倓倳倝値倧偺摦偐偣曽擖栧偵栠傞乴
嵟嬤壛懍搙僙儞僒偼怓乆側暔偵墳梡偝傟偰偄傑偡丄儘儃僢僩偺巔惃惂屼傗幵僄傾乕僶僢僌偺徴撍専弌
偵丄僇儊儔偺庤傇傟専弌丄実懷揹榖側偳丄揹榖偺廲墶傪曄偊傞偲夋柺曽岦偑曄傢偭偨傝偟傑偡傛偹丅
壛懍搙僙儞僒偼儌乕僔儑儞僙儞僒偲傕尵偄丄暔懱偑摦偔懍搙(侾昩偁偨傝偺懍搙偺曄壔傪専弌)傪應掕
偡傞暔偱丄孹偒(廳椡)傗摦偒偵怳摦偲徴寕傪専弌偡傞帠偑弌棃傑偡丅
傑偨丄壛懍搙僙儞僒偲帡偨條側暔偱妏懍搙僙儞僒(僕儍僀儘僙儞僒)偑桳傝傑偡偑丄
偙傟偼僙儞僒傪幉偵偟偰夞揮曽岦偺塣摦傪應掕偡傞暔偱丄暔懱偑侾昩娫偵壗搙偺夞揮塣摦傪
偟偰偄傞偺偐傪専弌偡傞帠偑弌棃傑偡丅
壛懍搙僙儞僒偼"廳椡"丒"怳摦(摦偒)"丒"徴寕"傪専弌偱偒傑偡偑丄
崱夞偼"廳椡"傪専弌偟丄僙儞僒偐傜撉傒崬傫偩抣傪棙梡偟偰孹幬偝偣偨応崌偺
妏搙(廳椡曽岦偵懳偡傞妏搙)傪昞帵偝偣偰尒傛偆偲巚偄傑偡丅
偙偙偱巊梡偡傞壛懍搙僙儞僒偼丄KXM52傪巊偄傑偟偨偑廐寧揹巕偺偙偪傜偱偼KXR94-2050偵
曄峏偵側偭偰偄傞條偱偡丅
丂堎側偭偰偄傞揰
丂丒 揹尮揹埑偑KXM52偼2.7V-5.5V偱丄KXR94偼2.5V-5.25V偱庒姳掅傔丅
丂丒 侽g僆僼僙僢僩岆嵎偑KXM52偼亇167mV(3.3V)偱丄KXR94偼亇50mV(3.3V)偱彮偟椙偔側偭偰偄傞丅
丂丒 姶搙岆嵎傕KXM52偼亇5%偱丄KXR94偼亇13mV偲側偭偰偄傞丅
丂丒 愙懕僺儞柤徧偑堎側偭偰偄傞丄KXM52偼2:PSD偲4:parity偱丄KXR94偼2:Enable偲4:Vmux偱偡偑
丂丂 婡擻偼摨偠條側巊偄曽偱偡丅
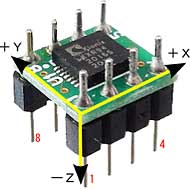 丂偙偺僙儞僒偼奺曽岦倃幉倄幉倅幉偺俁曽岦傪Arduino偺傾僫儘僌擖椡偵
丂偙偺僙儞僒偼奺曽岦倃幉倄幉倅幉偺俁曽岦傪Arduino偺傾僫儘僌擖椡偵
丂愙懕偡傞帠偵傛傝懍搙偺曄壔検傪撉傒庢傞帠偑弌棃傑偡丅
丂奺幉偺悈暯曽岦(0搙)偑侽倗偱丄悅捈曽岦(90搙)偑侾倗偱偡丅
丂側偺偱倅幉偼悅捈忬懺側偺偱侾倗偑婛偵壛偐偭偰偄傑偡丅
丂抧媴忋偱偼慡偰偺暔懱偵侾俧偺廳椡偑壛偐偭偰偄傞傜偟偄
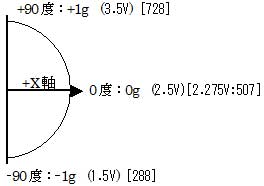 偙偺僙儞僒偺應掕偺儗儞僕偼亇俀倗偱偡丄
偙偺僙儞僒偺應掕偺儗儞僕偼亇俀倗偱偡丄
侽倗帪偺揹埑抣偼VDD/2(崱夞偼VDD:5V偱棙梡)偱2.5V
弌椡姶搙偼VDD/5(1g曈傝)側偺偱丄1V
亇90搙傑偱偺應掕偩偲3.5V(+1g)乣1.5V(-1g)偺揹埑抣偑摼傜傟
揹埑抣傪幚嵺偵應掕偡傞偲VDD=4.99V偱偟偨丅
Arduino偼0V乣5V(4.99V)傪 0乣1023偵曄姺偟偰撉傒傑偡丅
Arduino偺撉崬傒抣(X幉)偼728(1g)-507(0g)-288(-1g)偱偟偨丅
傑偨丄僙儞僒乕偑悈暯帪偺幚嵺偺應掕抣偼
倃幉偑2.275V偱撉崬傒抣偼507埵偱侽倗帪偺抣
倄幉偑2.415V偱撉崬傒抣偼520埵偱侽倗帪偺抣
倅幉偑3.241V偱撉崬傒抣偼756埵偱侾倗帪偺抣
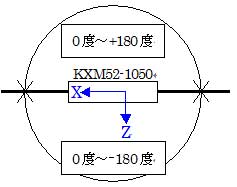 偙偙偺僗働僢僠偱偼嵍恾偺條偵倃倅偺俀幉傪巊偄360搙偺應掕偑
偙偙偺僗働僢僠偱偼嵍恾偺條偵倃倅偺俀幉傪巊偄360搙偺應掕偑
弌棃傑偡丅傑偨倄倅幉傪巊偆偲嵍塃曽岦傪應掕偱偒傑偡丅
(侾幉偺傒偱偺寁嶼偱偼360搙偺應掕偑弌棃側偄偺偱俀幉巊梡)
偙偙偱偼寁嶼幃偺愢柧偼徣偒傑偡丄嫽枴偁傞恖偼懠偺僒僀僩條傪
専嶕偟偰壓偝偄丅(幚偼偆傑偔愢柧弌棃側偐偭偨傝偟傑偡丏丏丏偊傊)
乻攝慄恾乼
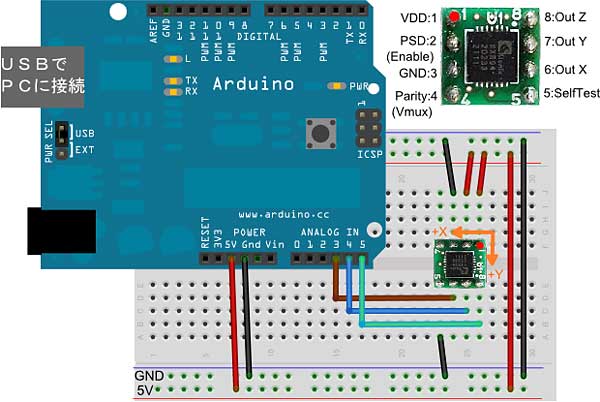
僙儞僒偺僺儞柤徧偼KXM52偺儌僨儖偱偡偑丄(丂)撪偺柤徧偼KXR94偺儌僨儖偱偡丅
愙懕僺儞偺婡擻偼峸擖偡傞偲晅懏偟偰偔傞愢柧彂傪尒傞偲椙偄偱偟傚偆丅
Arduino偺傾僫儘僌3斣僺儞偑X幉丄4斣僺儞偑Y幉丄5斣僺儞偑Z幉偵宷偑偭偰偄傑偡丅
乻僗働僢僠侾乼
傑偢偼丄僙儞僒乕偑弌椡偡傞偦偺傑傑偺抣傪昞帵偝偣偰尒傑偟傚偆
僙儞僒乕抣偼奺幉傪侾侽侽夞撉傒崬傫偱扨弮暯嬒壔偝偣偰偄傑偡丅
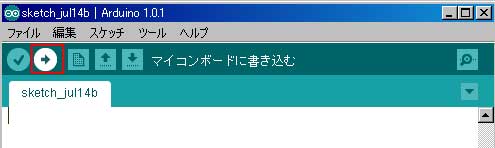
嘆忋婰恾夋柺偺條偵攝慄偟傑偟傚偆丅
嘇arduino儃乕僪(Arduino Duemilanove 328)偼USB働乕僽儖偱愙懕偟偰丄arduinoIDE傪婲摦偝偣傑偡丅
嘊俬俢俤偵壓婰偺僗働僢僠僾儘僌儔儉傪僐僺乕儁乕僗僩偟偰揬傝晅偗偰壓偝偄丅
---------------------------------------------------------------------
void setup()
{
// 僔儕傾儖儌僯僞乕偺弶婜壔傪偡傞
Serial.begin(9600) ;
}
void loop()
{
int i ;
long x , y , z ;
// 奺僨乕僞傪100夞撉崬傫偱暯嬒壔偡傞
x = y = z = 0 ;
for (i=0 ; i < 100 ; i++) {
x = x + analogRead(3) ; // 倃幉傪撉崬傓
y = y + analogRead(4) ; // 倄幉傪撉崬傓
z = z + analogRead(5) ; // 倅幉傪撉崬傓
}
x = x / 100 ;
y = y / 100 ;
z = z / 100 ;
// 撉傒崬傫偩奺幉傪偦偺傑傑昞帵偡傞
Serial.print("X:") ;
Serial.print(x) ; // X幉
Serial.print(" Y:") ;
Serial.print(y) ; // Y幉
Serial.print(" Z:") ;
Serial.println(z) ; // Z幉
delay(500) ;
}
---------------------------------------------------------------------
嘋俬俢俤僣乕儖僶乕偺愒榞晹暘偺儃僞儞傪僋儕僢僋偟偰僐儞僷僀儖偲arduino儃乕僪偵彂崬傒傪峴偄傑偡丅
嘍惓忢廔椆屻丄ArduinoIDE偺僔儕傾儖儌僯僞乕(塃懁偺傾僀僐儞)傪婲摦偟偰壓偝偄丄
丂壓婰夋柺偺條偵昞帵偝傟傞偲巚偄傑偡丅
丂彯丄僔儕傾儖儌僯僞乕偺巊偄曽偼偙偪傜傪嶲徠壓偝偄丅
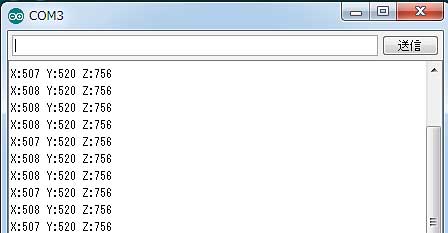
嵍寢壥偼僙儞僒乕傪悈暯偵抲偄偨
帪偺撪梕偱偡丅
XY幉偼0g偱Z幉偼1g偱偺撪梕偱偡
(僙儞僒乕偵傛傝抣偼曄傢傝傑偡)
僙儞僒乕傪摦偐偣偽昞帵偑曄傢傞偲巚偄傑偡丅
Z幉傪悈暯(0g)偵偟偨応崌偺抣偼
558埵偱偟偨丅
彯丄僙儞僒乕抣傪僌儔僼昞帵偝偣傞曽朄偼偙偪傜傪嶲峫偵偟偰壓偝偄丅
乻僗働僢僠俀乼
偙傫偳偼撉傒崬傫偩抣偐傜僙儞僒傪偦傟偧傟+X幉曽岦偲+Y幉曽岦偵孹偗偨応崌偺孹幬妏搙傪
寁嶼偝偣昞帵傪峴偄傑偟傚偆丅
---------------------------------------------------------------------
void setup()
{
// 僔儕傾儖儌僯僞乕偺弶婜壔傪偡傞
Serial.begin(9600) ;
}
void loop()
{
int i , a ;
long x , y , z ;
// 奺僨乕僞傪100夞撉崬傫偱暯嬒壔偡傞
x = y = z = 0 ;
for (i=0 ; i < 100 ; i++) {
x = x + analogRead(3) ; // 倃幉傪撉崬傓
y = y + analogRead(4) ; // 倄幉傪撉崬傓
z = z + analogRead(5) ; // 倅幉傪撉崬傓
}
x = x / 100 ;
y = y / 100 ;
z = z / 100 ;
// 妏搙傪寁嶼偟偰昞帵傪峴偆
a=atan2(x-507,z-558) / 3.14159 * 180.0 ;
Serial.print("X=") ;
Serial.print(a) ; // X幉曽岦妏搙昞帵
Serial.print(" Y=") ;
a=atan2(y-520,z-558) / 3.14159 * 180.0 ;
Serial.println(a) ; // Y幉曽岦妏搙昞帵
delay(500) ;
}
---------------------------------------------------------------------
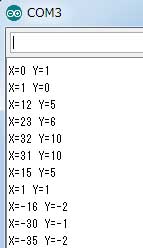
丂嵍恾偺條偵昞帵傪偡傞偲巚偄傑偡丅
丂+X幉曽岦傪忋偵孹偗偰峴偗偽侾乣侾俉侽搙偱昞帵偟丄
丂壓偵孹偗偰峴偗偽亅侾乣亅侾俉侽搙偱昞帵傪峴偄傑偡丅
丂(+Y幉曽岦偼嵍塃偵孹偗傑偡)
丂惛搙揑偵偼侾搙傎偳偺僘儗偱偼側偄偱偟傚偆偐丠
丂(偨偩偟KXM52偱偺敾抐偲側傝傑偡乯
丂a=atan2(x-507,z-558) / 3.14159 * 180.0 ;
丂a=atan2(y-520,z-558) / 3.14159 * 180.0 ;
丂偙偺X-507/Y-520/Z-558偼僗働僢僠侾偱昞帵偝偣偨侽倗帪偺抣傪偄傟傑偡丅
丂侽俧悈暯帪偺抣傪侽偵偡傞堊偺僆僼僙僢僩抣偱偡丄栺亇俀俀侽掱偱怳傟傞偲巚偄傑偡丅
扐偟拲堄偲偟偰偼丄偙偺抣偺X-507/Y-520/Z-558偼揹尮揹埑5.0V帪偱桳傝丄
揹尮偑3.3V偲偐偵側傞偲悢抣(彮側偔側傞)偼曄傢傝傑偡丅傑偨丄僙儞僒偺屄懱嵎摍偱傕堎側傝傑偡丅
彯丄孹幬寁偺條側暔傪惢嶌偡傞応崌偼丄偙偺僆僼僙僢僩抣傪娙扨偵愝掕弌棃傞傛偆側憖嶌偺巇妡偗偑
昁梫偵側傞偱偟傚偆丅
枖丄崱夞偺幚尡偺條偵僙儞僒傪摦偐偝側偄屌掕偟偨忬懺偵丄廳椡曽岦偺妏搙傪應掕偡傞応崌偵偼
忋庤偔妏搙傪摼傞帠偑壜擻偱偡丅
偱偡偑偀丄専弌暔懱偑摦偄偰偄傞強偵僙儞僒傪愝抲偟偰妏搙傪摼傛偆偲偡傞偲丄廳椡曽岦埲奜偺
奜晹揑側壛懍(G)偑壛傢傝傑偺偱丄偙偺條側応崌偼忋庤偔妏搙偑摼傜傟傑偣傫丄
偦傫側応崌偼僕儍僀儘僙儞僒傪巊偄傑偟傚偆丅丂*1)
乻偦偺懠乼
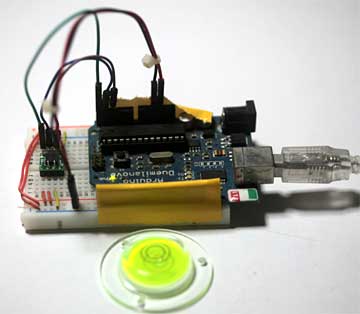
丂嵍偼幚尡晽宨偱偡丅
丂庤慜偺娵偄暔偼悈暯婍偱偡丅
丂偙偪傜(MMA7361)偺儌僕儏乕儖偑埨偄偺偱
丂偍姪傔偐傕偋
丂偦偺撪庤偵擖傟偨傜幚尡傪偟偰傒傑偡丅
丂傑偨丄偙偪傜(ADXL345)偺儌僕儏乕儖偼丄
丂SPI偐I2C偱愙懕偟傑偡丄
丂彯丄偙偺ADXL345偲PIC偱偺愙懕幚尡偼丄
丂偙偪傜偺暸傪嶲徠壓偝偄丅
丂偦偺撪偵"怳摦(摦偒)"傪専弌偟偰枩曕寁偺幚尡傪峴偍偆偲巚偭偰偄傑偡偑偀丏丏丏丏
婰帠堦晹捛婰(*1) 2016/07/23
亂偒傓拑岺朳僈儗乕僕僴僂僗亃
Copyright (C) 2006-2020 Shigehiro Kimura All Rights Reserved.